Sarcini statice asupra motoarelor mecanismelor principale ale macaralei
Puterea și cuplul arborelui motor al palanului macaralei în modul static de ridicare a sarcinii pot fi calculate prin formule
unde P este puterea axului motorului, kW; G este forța necesară pentru a ridica sarcina, N; G0 — forța de ridicare a dispozitivului de prindere, N; M este momentul axului motorului, Nm; v este viteza de ridicare a sarcinii, m / s; D este diametrul tamburului troliului de remorcare, m; η — randamentul mecanismului de ridicare; i este raportul de transmisie al cutiei de viteze și al palanului cu lanț.
În modul de coborâre, motorul macaralei dezvoltă o putere egală cu diferența dintre puterea de frecare Ptr și puterea datorată acțiunii greutății sarcinii descendente Pgr:
La coborârea sarcinilor medii și grele, energia este direcționată de la arborele angrenajului către motor deoarece Pgr >> Ptr (eliberarea frânei). În acest caz, puterea axului motorului, kW, va fi exprimată prin formula

La coborârea sarcinilor ușoare sau a unui cârlig gol, pot exista cazuri în care Pgr < Ptr.În acest caz, motorul funcționează cu un moment de mișcare (coborâre putere) și dezvoltă putere, kW,

Pe baza formulelor date, este posibil să se determine puterea motorului macaralei la orice sarcină pe cârlig. Când se calculează, trebuie amintit că eficiența mecanismului depinde de sarcina acestuia (Fig. 1).
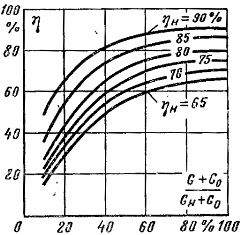
Orez. 1. Dependența eficienței mecanismului de sarcină.
Puterea și cuplul pe arborele motoarelor mecanismelor orizontale de mișcare a macaralei în modul static de funcționare pot fi determinate prin formule

unde P este puterea arborelui motor a mecanismului de mișcare a macaralei, kW; M este momentul arborelui motor al mecanismului de mișcare, Nm; G — greutatea încărcăturii transportate, N; G1 — greutatea proprie a mecanismului de mișcare, N; v — viteza de mișcare, m / s; R este raza roții, m; r este raza gâtului axei roții, m; μ — coeficientul de frecare de alunecare (μ = 0,08-0,12); f — coeficient de frecare la rulare, m (f = 0,0005 — 0,001 m); η — eficiența mecanismului de mișcare; k — coeficientul contabil pentru frecarea flanșelor roții pe șine; i — raportul de transmisie al reductorului trenului de rulare.
Într-o serie de mecanisme de ridicare și transport, mișcarea nu are loc în direcție orizontală. Este posibil și efectul încărcăturii vântului etc. Formula de determinare a puterii în acest caz poate fi reprezentată ca

Se notează suplimentar: α — unghiul de înclinare al ghidajelor față de planul orizontal; F — sarcina specifică vântului, N/m2; S este zona pe care presiunea vântului acționează la un unghi de 90 °, m2.
În ultima formulă, primul termen caracterizează puterea arborelui motor necesară pentru a depăși frecarea în timpul mișcării orizontale; al doilea termen corespunde forței de ridicare, al treilea este componenta de putere din sarcina vântului.
Un număr de macarale au o placă turnantă pe care se află echipamentul de lucru. Mișcarea platformei se transmite printr-o roată dințată (plată turnantă) cu un diametru Dkp montat pe ea. Intre platforma si baza fixa se gasesc role (role) cu diametrul de dp. În acest caz, puterea și cuplul motorului macaralei datorate forțelor de frecare se regăsesc în mod similar în cazul mișcării alternative și anume:

Aici, pe lângă valorile cunoscute: G2 este greutatea platanului cu toate echipamentele pe el, N; ωl — viteza unghiulară, platforme, rad/sec; în — raportul de transmisie al cutiei de viteze a mecanismului de balansare și al angrenajului de antrenare al transmisiei — platou rotativ.

La determinarea puterii acționării electrice a macaralei, în unele cazuri este necesar să se țină cont de modificarea sarcinii atunci când se lucrează pe o pantă. Sarcina vântului asupra mecanismelor rotative se determină luând în considerare diferența dintre forțele vântului care acționează asupra sarcinii, brațul macaralei și contragreutatea.
La proiectarea acționărilor electrice pentru mecanismele de macara, la sfârșitul selecției motorului, antrenarea electrică este verificată pentru valorile de accelerație admise, datele pentru care sunt date în tabelul 1.
Tabelul 1 Denumirea mecanismelor și scopul acestora
Denumirea mecanismelor și scopul acestora Accelerație, m/s2 Mecanisme de ridicare destinate ridicării metalelor lichide, obiectelor fragile, produselor, lucrărilor diverse de montaj 0,1 Mecanisme de ridicare a parcurilor de montaj și ateliere metalurgice 0,2 — 0,5 Mecanisme de ridicare a macaralelor de prindere 0,8 Mecanisme pt. mișcarea macaralelor destinate lucrărilor de asamblare de precizie și transport de metale lichide, obiecte fragile 0,1 - 0,2 Mecanisme de mișcare cu forța de atracție a gravitației la maxim 0,2 - 0,7 Cărucioare macarale cu aderență completă 0,8 — 1,4 Pivoare macarale 0,5 — 1,2