Caracteristicile mecanice ale unui motor cu inducție la diferite moduri, tensiuni și frecvențe
 Caracteristicile mecanice ale motoarelor cu inducție pot fi exprimate ca n = f (M) sau n=e(I). Cu toate acestea, caracteristicile mecanice ale motoarelor asincrone sunt adesea exprimate sub forma unei dependențe M = f(S), unde C — alunecare, S = (nc-n) / nc, unde ns — viteza sincronă.
Caracteristicile mecanice ale motoarelor cu inducție pot fi exprimate ca n = f (M) sau n=e(I). Cu toate acestea, caracteristicile mecanice ale motoarelor asincrone sunt adesea exprimate sub forma unei dependențe M = f(S), unde C — alunecare, S = (nc-n) / nc, unde ns — viteza sincronă.
În practică, o formulă simplificată numită formula Kloss este utilizată pentru construcția grafică a caracteristicilor mecanice:

aici: Mk — valoarea critică (maximă) a cuplului. Această valoare a momentului corespunde alunecării critice

unde λm = Mk / Mn
Formula lui Kloss este folosită pentru a rezolva probleme legate de acţionarea electrică efectuată cu ajutorul unui motor cu inducţie. Folosind formula Kloss, puteți construi un grafic al caracteristicilor mecanice în funcție de datele pașaportului motorului cu inducție. Pentru calcule practice, numai semnul plus ar trebui să fie luat în considerare în formulă atunci când se determină momentul critic înainte de rădăcină.
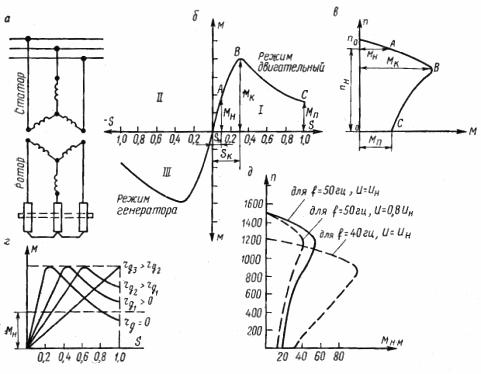
Orez. 1.Motor asincron: a — diagramă schematică, b — caracteristică mecanică M = f (S) — naturală în modurile motor și generator, c — caracteristică mecanică naturală n = f (M) în modul motor, d — caracteristicile mecanice ale unui reostat artificial , e — caracteristici mecanice pentru diferite tensiuni și frecvențe.

Motor cu inducție în cușcă veveriță
După cum se poate observa din fig. 1, caracteristicile mecanice ale unui motor cu inducție situat în cadranele I și III. Porțiunea de curbă din cadranul I corespunde unei valori pozitive de alunecare și caracterizează modul de funcționare al motorului asincron, iar în cadranul III, modul generator. Modul motor este de cel mai mare interes practic.
Graficul caracteristicilor mecanice ale modului motor conține trei puncte caracteristice: A, B, C și poate fi împărțit condiționat în două secțiuni: OB și BC (Fig. 1, c).
Punctul A corespunde cuplului nominal al motorului și este determinat de formula Mn = 9,55•103•(Strn /nn)
Acest moment corespunde alunecarea nominală, care pentru motoarele cu aplicație industrială generală are o valoare în intervalul de la 1 la 7%, adică Sn = 1 — 7%. În același timp, motoarele mici au mai mult alunecare, iar cele mari au mai puțin.
Motoarele cu alunecare mare destinate încărcării cu șoc au Сn~15%. Acestea includ, de exemplu, motoare cu curent alternativ de o singură serie.
Punctul C al caracteristicii corespunde cuplului inițial care apare pe arborele motorului la pornire. Acest moment Mp se numește inițial sau pornire. În acest caz, alunecarea este egală cu unitatea, iar viteza este zero. Cuplul de pornire este ușor de determinat din datele din tabelul de referință, care arată raportul dintre cuplul de pornire și Mp / Mn nominal.
Mărimea cuplului de pornire la valori constante ale tensiunii și frecvenței curentului depinde de rezistența activă din circuitul rotorului. În acest caz, inițial pe măsură ce rezistența activă crește, valoarea cuplului de pornire crește, ajungând la maxim atunci când rezistența activă a circuitului rotor este egală cu rezistența inductivă totală a motorului. Ulterior, pe măsură ce rezistența activă a rotorului crește, valoarea cuplului inițial scade, tinzând la zero în limită.
Punctul C (Fig. 1, b și c) corespunde unui moment maxim care poate dezvolta motorul în întregul interval de rotații de la n = 0 la n = ns... Acest moment se numește momentul critic (sau de răsturnare) Mk . Momentul critic corespunde și alunecării critice Sk. Cu cât valoarea alunecării critice Sk este mai mică, precum și valoarea alunecării nominale Сn, cu atât rigiditatea caracteristicilor mecanice este mai mare.
Momentele de pornire și momentele critice sunt determinate de cele nominale. Conform GOST pentru mașinile electrice cu motor cu colivie, trebuie îndeplinită condiția Mn / Mn = 0,9 — 1,2, Mk / Mn = 1,65 — 2,5.
Trebuie remarcat faptul că valoarea momentului critic nu depinde de rezistența activă a circuitului rotor, în timp ce alunecarea critică Сk este direct proporțională cu această rezistență.Aceasta înseamnă că, odată cu creșterea rezistenței active a circuitului rotorului, valoarea momentului critic rămâne neschimbată, dar maximul curbei cuplului se schimbă la valori crescătoare de alunecare (Fig. 1, d).
Mărimea cuplului critic este direct proporțională cu pătratul tensiunii aplicate statorului și invers proporțională cu pătratul frecvenței tensiunilor și frecvenței curentului din stator.
Dacă, de exemplu, tensiunea furnizată motorului este egală cu 85% din valoarea nominală, atunci mărimea cuplului critic va fi 0,852 = 0,7225 = 72,25% cuplu critic la tensiunea nominală.
Opusul se observă la schimbarea frecvenței. Dacă, de exemplu, la un motor proiectat să funcționeze cu o frecvență de curent de = 60 Hz, un curent de alimentare cu o frecvență de = 50 Hz, atunci momentul critic va veni la (60/50)2=1,44 ori mai mare decât valoarea oficială a frecvenței acesteia (Fig. 1, e).
Momentul critic caracterizează capacitatea de suprasarcină instantanee a motorului, adică arată ce moment (în câteva secunde) de suprasarcină este capabil să reziste motorul fără consecințe dăunătoare.

Secțiunea caracteristicii mecanice de la zero la valoarea maximă (critică) (vezi Fig. 1, biv) se numește partea stabilă a caracteristicii, iar secțiunea BC (Fig. 1, c) - partea instabilă.
Această împărțire se explică prin faptul că pe partea crescândă a caracteristicilor OF cu alunecare crescândă, i.e. pe măsură ce viteza scade, cuplul dezvoltat de motor crește.Aceasta înseamnă că pe măsură ce sarcina crește, adică pe măsură ce cuplul de frânare crește, viteza de rotație a motorului scade, iar cuplul crescut de aceasta crește. Când sarcina scade, dimpotrivă, viteza crește și cuplul scade. Pe măsură ce sarcina se modifică în intervalul părții stabile a caracteristicii, viteza de rotație și cuplul motorului se modifică.
Motorul nu poate dezvolta mai mult decât cuplul critic, iar dacă cuplul de frânare este mai mare, motorul trebuie să se oprească inevitabil. Se întâmplă o răsturnare a motorului, după cum se spune.
O caracteristică mecanică la constanta U și I și absența rezistenței suplimentare în circuitul rotorului se numește o caracteristică naturală (caracteristică a unui motor cu inducție în cușcă de veveriță cu un rotor bobinat fără rezistență suplimentară în circuitul rotorului). Caracteristicile artificiale sau reostatice se numesc acelea care corespund rezistenței suplimentare din circuitul rotorului.
Toate valorile cuplului de pornire sunt diferite și depind de rezistența activă a circuitului rotorului. Glisoarele de mărimi diferite corespund aceluiași cuplu nominal Mn. Pe măsură ce rezistența circuitului rotorului crește, alunecarea crește și, prin urmare, viteza motorului scade.
Datorită includerii rezistenței active în circuitul rotorului, caracteristica mecanică în partea stabilă este întinsă în direcția creșterii alunecării, proporțional cu rezistența.Aceasta înseamnă că turația motorului începe să varieze semnificativ în funcție de sarcina arborelui, iar caracteristica tare devine moale.