Selectarea unui motor electric asincron pentru funcționarea în modul de frânare dinamică prin autoexcitare
 Motor electric asincron cu rotor bobinat cu cea mai simplă schemă de control - includerea rezistenței în circuitul rotorului are proprietăți de control extrem de scăzute. Prin urmare, înainte de disponibilitatea convertoarelor de frecvență pe piață, au fost dezvoltate diverse scheme pentru a obține viteză redusă în modul step-down.
Motor electric asincron cu rotor bobinat cu cea mai simplă schemă de control - includerea rezistenței în circuitul rotorului are proprietăți de control extrem de scăzute. Prin urmare, înainte de disponibilitatea convertoarelor de frecvență pe piață, au fost dezvoltate diverse scheme pentru a obține viteză redusă în modul step-down.
De fapt, nu sunt atât de mulți. În străinătate, utilizarea unei mașini electrice suplimentare – o frână vortex montată pe același arbore cu motorul principal – a devenit larg răspândită. Schema vă permite să obțineți caracteristici mecanice suficient de rigide atunci când coborâți sarcina, dar o astfel de acționare electrică are caracteristici energetice extrem de scăzute (energia de frânare este eliberată în frâna vortex). În plus, frâna vortex are un cost destul de ridicat și complică foarte mult aspectul părții mecanice.
Așadar, pentru a obține viteza de aterizare în mecanisme de ridicare bazate pe un motor asincron cu rotor de fază la uzina Dynamo la sfârșitul anilor 1970, o echipă de proiectare condusă de E.M. Pevzner a introdus frânarea dinamică auto-excitată.
O astfel de acționare electrică este utilizată pe scară largă în macaralele domestice (panouri de tip TSD, TSDI, KSDB pentru poduri, poduri și poduri, panouri de control pentru macaralele turn KB-309, KB-403, KB-404, KB-405, KB - 406, KB-408, KB-415, KB-415-07, KB-473, KBM-401P.). Astfel, vorbim de zeci de mii de macarale aflate in functiune.
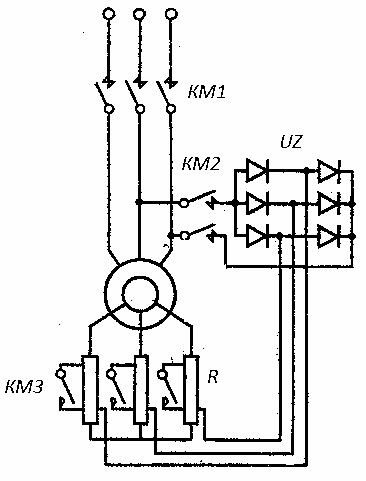
Orez. 1. Schema de includere a unui motor asincron în modul de frânare dinamică prin autoexcitare
Principiul frânării dinamice cu autoexcitare este următorul:
Circuitul rotorului include redresor trifazat UZ (Fig. 1). Motorul electric este deconectat de la rețea prin contactorul KM1. Tensiunea redresată este conectată la înfășurarea statorului prin contactorul KM2. Contactele contactorului KM3 sunt închise. Când frâna este eliberată (nu este prezentată în diagramă), arborele motorului începe să se rotească sub acțiunea greutății în cădere.
În înfășurarea rotorului este indus un EMF, sub influența căruia începe să curgă un curent în circuitul rotor-stator. Motorul dezvoltă cuplul de frânare, sarcina este coborâtă la o viteză constantă. Valoarea vitezei este determinată de valoarea rezistenței circuitului rotorului. Cu cât rezistența este mai mare, cu atât rata de coborâre este mai rapidă. Pentru a crește viteza, contactorul KM3 este oprit.
În modul de frânare dinamică cu autoexcitare, acționarea electrică consumă energie din rețea doar pentru a alimenta împingătorul hidraulic al frânei și echipamentul releu-contactor. Ca exemplu, Fig. 7 prezintă caracteristicile mecanice ale unei acționări electrice cu panou TSD.
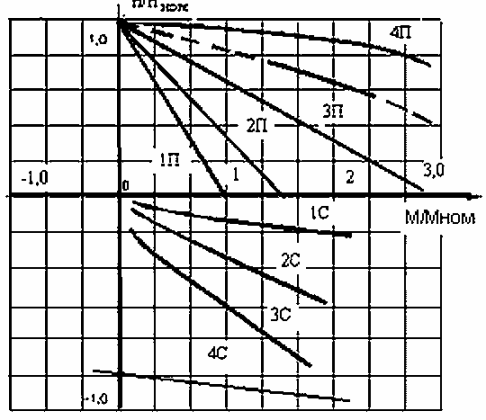
Orez. 2. Caracteristici mecanice ale acționării electrice a mecanismului de ridicare cu panoul TSD
Caracteristicile de frânare dinamică sunt desemnate ca 1C, 2C, 3C. Se poate observa că caracteristicile au duritate suficientă. Reglarea vitezei se efectuează în intervalul 1: 8, care în cele mai multe cazuri este suficient pentru robinete de masă.
Condiția de autoexcitare a motorului electric este:
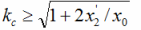
Unde x '2- rezistența inductivă a înfășurării rotorului, Ohm; хо- rezistența inductivă a circuitului de magnetizare. Om
Unde ks — coeficientul schemei
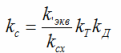
kd — coeficientul de reducere a curentului rotoric la curentul statoric; kcx — coeficientul circuitului de corecție, pentru un circuit în punte trifazat kx = 0,85; kt este coeficientul de transformare al motorului de la stator la rotor
Coeficientul kd depinde de schema de conectare a înfășurărilor statorului, care sunt conectate la o stea în motoarele de robinete de uz casnic la o tensiune de rețea de 380 V.
Coeficientul kt depinde de coeficientul de transformare, i.e. a raportului dintre tensiunea statorului și tensiunea rotorului, care depinde de tipul de motor. De exemplu, pentru mai multe motoare electrice din seriile MT și 4MT, valoarea și parametrii aferenti sunt tabulate. 1.
Tabelul 1.
Puterea tip motor electric, kWt Tensiune rotor, V kt x x '2 xho √(1 + 2x '2/ho) MTN412-6 30 255 1.5 1.3 0.173 3.74 1.04 4MTN225L6 55 290 1.31 . 6 55 340 1,11 0,98 0,197 3,8 1,05 4MTN280L10 75 308 1,23 1,06 0,146 2,33 1,06 4MTN280M6 110 420 0. 9 0,7 0,083 2,98 1.
Condiția кс ≥ √(1 + 2х '2/хо) se realizează pentru motoarele de tip MTN412-6, 4MTN225L6, care pot fi numite „excitate”. Astfel de motoare electrice intră în modul de autoexcitare fără a lua decizii suplimentare de circuit. Cu toate acestea, în dispozitivele complete de joasă tensiune (aparatură de joasă tensiune sau panouri de control) proiectate să funcționeze împreună cu astfel de motoare, este prevăzută o mică excitație inițială pentru o funcționare fiabilă.
Excitația inițială se realizează prin trecerea unei constante, așa-numita O valoare mică a „curentului de alimentare” (de obicei nu mai mult de 10% din curentul nominal al motorului) de la un redresor cu jumătate de undă. Pentru motoarele excitate, în orice caz, acest lucru este suficient pentru o tranziție fiabilă la modul de frânare dinamică autoexcitată.
Motoarele electrice MTN512-6, 4MTN280M6, pentru care nu este îndeplinită condiția кс ≥ √(1 + 2х '2/хо), sunt „neexcitate”. Aceasta nu înseamnă că astfel de motoare nu pot funcționa în modul de frânare dinamică cu autoexcitare, dar valoarea curentului suplimentar necesar pentru ele atinge 50% din curentul nominal al statorului.Acest lucru necesită utilizarea NKU (panouri de control) speciale pentru motoarele electrice neexcitate. …
Motorul electric tip 4MTN280L10 cu кс = √(1 + 2х '2/хо) se află la limita autoexcitației și orice modificare aleatorie a parametrilor poate încălca condiția de autoexcitare. Prin urmare, un astfel de motor poate fi, de asemenea, clasificat ca non-excitabil.
Principalii parametri care afectează capacitatea motorului electric de a se autoexcita sunt tensiunea nominală a rotorului E2nom. Valoarea critică a lui E2nom, la care autoexcitarea nu are loc fără un curent mare de alimentare, ar trebui luată ca 300 V.
Această caracteristică a modului de frânare dinamică cu autoexcitare a fost luată în considerare de fabrica Dynamo și Sibelektromotor PO la dezvoltarea unei serii de motoare electrice de macara de 4MT la începutul anilor 1980.
În special, valoarea E2nom pentru unele motoare electrice a fost redusă în comparație cu seria MT anterioară pentru a face motoarele excitabile.
De exemplu, pentru motorul electric 4MTN225L6, utilizat pe scară largă în antrenarea electrică a macaralelor turn, E2nom a fost redus în comparație cu motorul anterior din seria MTN512-6 de la 340 la 290 V, ceea ce a făcut ca motorul să se autoexcita. Ulterior, OJSC „Sibelectromotor” a început producția de motor electric 4MTM225L6 cu aceiași parametri.
De-a lungul timpului, motoarele electrice cu un scop similar au început să fie produse de alți producători.
Uzina de construcții de macara Rzhevsky produce motorul electric MKAF225L6, Compania Electrotehnică Siberiană produce motorul electric 4MTM225L6 PND.În ciuda aspectului diferit față de prototip legat de capacitățile tehnologice ale fiecăruia dintre producători, toate aceste motoare electrice au aceiași parametri electrici și dimensiuni de instalare și sunt complet interschimbabile.
Diferența dintre denumirile motoarelor permite utilizatorului să facă o alegere în cunoștință de cauză a unuia sau altuia producător, ghidat de propriile preferințe, preț, termen de livrare etc. Și, în același timp, fiți absolut sigur că înlocuirea unui motor electric al unui producător de robinete cu un motor electric al altui producător nu va duce la o defecțiune a robinetului sau la un accident.
Cu toate acestea, în ultimul deceniu, pe piața internă au apărut motoare electrice de la diverși producători, a căror marcă reproduce exact marca motorului electric „original” produs de JSC „Sibelectromotor”. Se poate presupune că originea motoarelor electrice este legată de marele vecin de est al țării noastre. Prețul lor este puțin mai mic decât cel al producătorilor tradiționali, astfel încât interesul față de ei din aprovizionarea întreprinderilor este de înțeles.
Astfel, comandand un motor electric pentru montare pe o macara fabricata sau inlocuind un motor electric deteriorat de pe o macara cu unul functional, puteti obtine un motor electric de un producator necunoscut, cu un E2nom diferit de prototipul de motor electric.
Situația amintește oarecum de începutul anilor 90, când mai multe grupuri pop cu același nume făceau turnee prin țară în același timp.
Să reamintim încă o dată că raportul E2nom / I2nom este cel mai important parametru al unui motor cu rotor bobinat, afectând alegerea rezistențelor de pornire, a echipamentelor releu-contactor și, după cum sa menționat mai sus, în condiția autoexcitarii motor electric.
Deseori, însă, nu există deloc date despre rotor pe plăcuțele de identificare ale motoarelor clonate. Iată un exemplu:
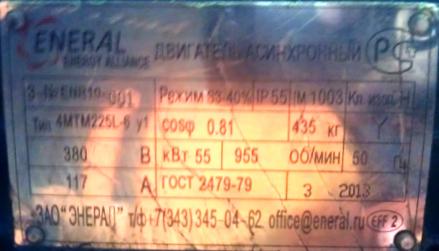
Orez. 3. Plăcuța de identificare a motorului asincron al macaralei cu rotor
Apropo, acest motor electric avea valoarea „corectă” E2nom, doar că acum trebuia determinat empiric.
În cataloagele altor producători pentru motorul electric 4MTM225L6 este indicată valoarea E2nom = 340 V, adică. motorul excitat a devenit unul neexcitat. Consecința utilizării unui astfel de motor electric ca parte a unei acționări electrice cu frânare dinamică cu autoexcitare este o scădere a sarcinii și separarea motorului electric cu distrugerea mecanică a înfășurărilor rotorului și statorului.
Este exact această imagine pe care autorul a observat-o recent într-una dintre cele mai vechi întreprinderi rusești de construcție de mașini, unde a fost livrată o nouă macara pod cu un motor electric clonat de tip 4MTM225L6 cu E2n = 340 V. Numai din noroc, oamenii nu au făcut-o. suferi. În plus, proprietarul macaralei restaurează motorul de trei (!) ori după ce s-a eschivat.
Un alt producător de motoare electrice clonate, care se pare că se confruntă în mod repetat cu accidente similare, produce acum două motoare electrice sub aceeași marcă (!). Unul cu E2nom = 340 V, celălalt cu E2nom = 264 V este dat în catalog cu o notă: „pentru robinete tip KB”, adică. macarale turn.
Un astfel de motor este într-adevăr cel mai utilizat pe macaralele turn, dar este instalat și pe poduri. Așadar, puteți auzi dialogul dintre Furnizor și Client: „Pentru ce macara aveți nevoie de un motor? Pentru podea. Apoi luați-l pe acesta (E2nom = 340 V). » Și în acționarea palanelor electrice există un panou de comandă cu frânare dinamică autoexcitată. Rezultatul este descris mai sus.
În același timp, nimeni nu spune că aceste motoare electrice sunt defecte sau nefiabile și nu pot fi folosite la macarale. Cu cât mai multe opțiuni pe piață, cu atât mai bine. După cum se spune, există mai multe motoare bune și diferite. Doar că marca lor induce în eroare consumatorul, care poate fi plin de consecințe periculoase.
Pentru a utiliza un motor electric cu alți parametri ai rotorului decât prototipul, trebuie să:
-
Măsurați E2nom când circuitul rotorului este deschis și înfășurarea statorului este conectată la rețea;
-
Pe baza măsurătorilor E2nom, calculați, selectați și comandați rezistențe de balast;
-
Alegeti un panou de comanda pentru motoare electrice fara excitatie din catalog si comandati-l.
Sau puteți pur și simplu să întrebați despre valoarea lui E2nom înainte de a comanda un motor care atrage prin prețul său și să fiți de acord în mod specific asupra acestui lucru în contract. Totuși, acest lucru nu împiedică măsurarea E2nom în timpul controlului intrării motorului comandat.
Rezumând cele de mai sus, putem trage următoarele concluzii:
-
În acţionarea electrică a robinetelor de uz casnic bazate pe motoare electrice cu rotor de fază, frânarea dinamică auto-excitată este utilizată pe scară largă. Zeci de mii de astfel de acționări electrice sunt în funcțiune. Ele sunt încă în curs de eliberare.
-
Pentru a funcționa în modul de frânare dinamică autoexcitată, motorul electric trebuie să aibă un anumit raport E2nom / I2nom.
-
Condiția principală pentru autoexcitarea unui motor electric cu un rotor bobinat este valoarea E2nom ≤ 300 V.
-
Utilizarea motoarelor electrice cu E2nom> 300 V cu panouri de control proiectate pentru motoare electrice excitate poate duce la scăderea sarcinii și distrugerea motorului electric.