Sistem generator — motor DC
 Diverse mașini-unelte necesită adesea controlul continuu al vitezei de antrenare într-un interval mai larg decât poate fi asigurat prin reglarea fluxului magnetic. Motor DC cu excitație paralelă… În aceste cazuri, sunt utilizate sisteme de acționare electrică mai complexe.
Diverse mașini-unelte necesită adesea controlul continuu al vitezei de antrenare într-un interval mai larg decât poate fi asigurat prin reglarea fluxului magnetic. Motor DC cu excitație paralelă… În aceste cazuri, sunt utilizate sisteme de acționare electrică mai complexe.
În fig. 1 prezintă o diagramă a unui antrenament electric reglabil conform unui sistem generator-motor (abreviat G — D). În acest sistem, un motor cu inducție IM rotește continuu un generator CC excitat independent G și un excitator B, care este un generator CC de putere mică excitat în paralel.
Motorul DC D antrenează corpul de lucru al mașinii. Înfășurările de excitație ale generatorului OVG și ale motorului ATS sunt alimentate de excitatorul B. Prin modificarea rezistenței circuitului de excitație al generatorului G de către reostatul 1, se modifică tensiunea aplicată armăturii motorului D și, astfel, turația motorului este reglată. În acest caz, motorul funcționează la flux complet și constant deoarece reostatul 2 este îndepărtat.
Când tensiunea U se modifică, turația se modifică n0 turație ideală de mers în gol a motorului D. Deoarece fluxul motorului și rezistența circuitului armăturii sale nu se modifică, panta b rămâne constantă. Prin urmare, caracteristicile mecanice rectilinie corespunzătoare diferitelor valori ale lui U sunt situate una sub alta și paralele între ele (Fig. 2).
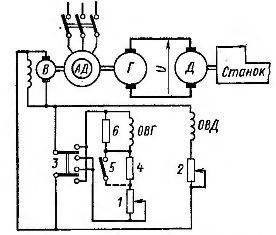
Orez. 1. Generator de sistem - motor DC (dpt)
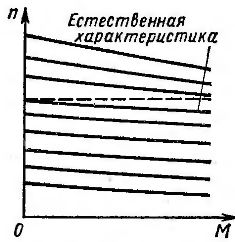
Orez. 2. Caracteristicile mecanice ale generatorului — sistem motor DC
Au o pantă mai mare decât caracteristicile aceluiași motor electric alimentat din rețeaua constantă, deoarece în sistemul G — D tensiunea U la un curent de excitație constant al generatorului scade odată cu creșterea sarcinii în funcție de dependență:
unde de ex. respectiv rg — e. etc. pp. şi rezistenţa internă a generatorului.
Prin analogie cu motoarele asincrone, notăm
Această valoare caracterizează scăderea turației motorului atunci când sarcina crește de la zero la nominal. Pentru caracteristici mecanice paralele
Această valoare crește pe măsură ce n0 scade. La valori mari ale sn, condițiile de tăiere specificate se vor schimba semnificativ cu fluctuații aleatorii ale sarcinii. Prin urmare, domeniul de reglare a tensiunii este de obicei mai mic de 5:1.
Pe măsură ce puterea nominală a motoarelor scade, căderea de tensiune pe motoare crește, iar caracteristicile mecanice devin mai abrupte. Din acest motiv, domeniul de reglare a tensiunii a sistemului G -D este redus pe măsură ce puterea scade (pentru puteri mai mici de 1 kW la 3:1 sau 2:1).
Pe măsură ce fluxul magnetic al generatorului scade, efectul de demagnetizare al reacției armăturii acestuia îi afectează într-o măsură mai mare tensiunea. Prin urmare, caracteristicile asociate cu turațiile reduse ale motorului au de fapt o pantă mai mare decât caracteristicile mecanice.
Extinderea domeniului de control se realizează prin reducerea fluxului magnetic al motorului D prin intermediul reostatului 2 (vezi Fig. 1), produs la debitul maxim al generatorului.Această metodă de reglare a vitezei corespunde caracteristicilor situate deasupra celui natural. unul (vezi fig. 2).
Domeniul de control total, egal cu produsul intervalelor de control ale ambelor metode, atinge (10 — 15): 1. Reglarea tensiunii este controlul constant al cuplului (deoarece fluxul magnetic al motorului rămâne neschimbat). Reglarea prin modificarea fluxului magnetic al motorului D este o reglare constantă a puterii.
Înainte de a porni motorul, reostatul D 2 (vezi fig. 1) este complet îndepărtat și fluxul motorului atinge cea mai mare valoare. Apoi reostatul 1 crește excitația generatorului G. Acest lucru face ca tensiunea să crească și viteza motorului D să crească. Dacă bobina OVG este conectată imediat la tensiunea maximă UB a excitatorului B, curentul din ea, ca în orice circuit cu inductanță și rezistență activă, va crește:
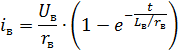
unde rv este rezistența bobinei de excitație, LB este inductanța acesteia (neglijați efectul saturației circuitului magnetic).
În fig. 3, a (curba 1) prezintă un grafic al dependenței curentului de excitație de timp. Curentul de excitație crește treptat; rata de creștere este determinată de raport

unde Tv este constanta de timp electromagnetică a înfășurării de excitație a generatorului; are dimensiunea timpului.
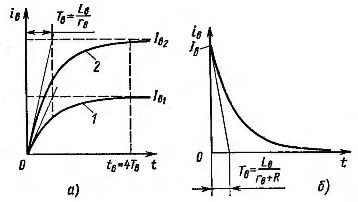
Orez. 3. Modificarea curentului de excitație în sistemul G-D
Modificarea tensiunii generatorului la pornire are aproximativ același caracter ca modificarea curentului de excitație. Acest lucru permite motorului să pornească automat cu reostatul 1 scos (vezi Fig. 1).
Creșterea curentului de excitație al generatorului este adesea accelerată (forțată) prin aplicarea în momentul inițial la înfășurarea de excitație a unei tensiuni care depășește valoarea nominală.Atunci procesul de creștere a excitației va continua de-a lungul curbei 2 (vezi Fig. 3, a ). Când curentul din bobină ajunge la Iv1, egal cu curentul de excitație în regim permanent la tensiunea nominală, tensiunea bobinei de excitare este redusă la valoarea nominală. Timpul de creștere a curentului de excitație la valoarea nominală este redus.
Pentru a forța excitarea generatorului, tensiunea excitatorului V (vezi Fig. 1) este selectată de 2-3 ori mai mare decât tensiunea nominală a bobinei de excitație a generatorului și se introduce un rezistor suplimentar 4 în circuit. …
Sistemul generator-motor permite frânarea regenerativă. Pentru a opri, este necesar ca curentul din armătură să-și schimbe direcția. De asemenea, cuplul va schimba semnul și în loc să conducă, va deveni frânare. Oprirea are loc atunci când fluxul magnetic al reostatului motor 2 crește sau când tensiunea generatorului scade odată cu reostatul 1. În ambele cazuri, de ex. etc. c. E a motorului devine mai mare decât tensiunea U a generatorului.În acest caz, motorul D funcționează în modul generator și este antrenat în rotație de energia cinetică a maselor în mișcare, iar generatorul G funcționează în modul motor, rotind mașina IM la viteză supersincronă, care în același timp comută în modul generator și furnizează energie rețelei.
Frânarea regenerativă se poate face fără a afecta reostatele 1 și 2. Puteți deschide pur și simplu circuitul de excitare a generatorului (de exemplu, comutatorul 3). În acest caz, curentul dintr-un circuit închis constând din înfășurarea de excitație a generatorului și a rezistenței 6 va scădea treptat.
unde R este rezistența rezistorului 6.
Graficul corespunzător acestei ecuații este prezentat în Fig. 3, b. O scădere treptată a curentului de excitație al generatorului în acest caz este echivalentă cu o creștere a rezistenței reostatului 1 (vezi Fig. 1) și provoacă frânare regenerativă. În acest circuit, rezistorul 6 conectat în paralel cu înfășurarea de excitație a generatorului este un rezistor de descărcare. Protejează izolația înfășurării de excitație împotriva deteriorării în cazul unei întreruperi bruște de urgență a circuitului de excitație.
Când circuitul de excitare este întrerupt, fluxul magnetic al mașinii scade brusc, induce e în spirele bobinei de excitare. etc. c. auto-inductanța este atât de mare încât poate provoca ruperea izolației înfășurării. Rezistorul de descărcare 6 creează un circuit în care e. etc. c. autoinducţia bobinei de câmp induce un curent care încetineşte scăderea fluxului magnetic.
Căderea de tensiune pe rezistorul de descărcare este egală cu tensiunea pe bobina de câmp.Cu cât valoarea rezistenței de descărcare este mai mică, cu atât tensiunea bobinei de excitație este mai mică atunci când circuitul este întrerupt. În același timp, cu o scădere a valorii rezistenței rezistorului de descărcare, curentul care curge continuu prin acesta în modul normal și pierderile din acesta cresc. Ambele prevederi trebuie luate în considerare la selectarea valorii rezistenței de descărcare.
După ce înfășurarea de excitație a generatorului este oprită, o tensiune mică rămâne la bornele sale din cauza magnetismului rezidual. Acest lucru poate face ca motorul să se rotească încet la ceea ce este cunoscut sub numele de viteză de glisare. Pentru a elimina acest fenomen, înfășurarea de excitație a generatorului, după ce a fost deconectată de la excitator, este conectată la bornele generatorului, astfel încât tensiunea din magnetismul rezidual provoacă un curent de demagnetizare în înfășurarea de excitație a generatorului.
Pentru a inversa motorul electric D, direcția curentului în bobina de excitație a generatorului OVG G este schimbată folosind comutatorul 3 (sau alt dispozitiv similar). Datorită inductanței semnificative a bobinei, curentul de excitație scade treptat, își schimbă direcția și apoi crește treptat.
Procesele de pornire, oprire și inversare a motorului în sistemul considerat sunt extrem de economice, deoarece sunt efectuate fără utilizarea reostatelor incluse în armătură. Motorul este pornit și decelerat folosind un echipament ușor și compact care controlează doar curenți mici de câmp. Prin urmare, acest sistem „generator – motor DC” este recomandat a fi utilizat pentru lucrul cu porniri frecvente, frânări și inversări.
Principalele dezavantaje ale sistemului motor-generator-DC sunt eficiența relativ scăzută, costul ridicat și greoi din cauza prezenței unui număr mare de mașini electrice în sistem. Prețul sistemului depășește de 8-10 ori prețul unui motor asincron cu colivie de veveriță cu aceeași putere. Mai mult, așa sistem de antrenare electric necesită mult spațiu.