Echipamente electrice ale ascensoarelor
 Un lift este o mașină de ridicare ciclică concepută pentru ridicarea verticală a persoanelor și a mărfurilor. La programare, lifturile sunt împărțite în pasager, marfă-pasager, spital, marfă.
Un lift este o mașină de ridicare ciclică concepută pentru ridicarea verticală a persoanelor și a mărfurilor. La programare, lifturile sunt împărțite în pasager, marfă-pasager, spital, marfă.
În funcție de viteza mașinii, ascensoarele sunt împărțite în viteză mică (până la 0,71 m / sec), viteză mare (de la 1 la 1,6 m / sec), viteză mare (de la 2 la 4 m / sec) și de mare viteză (4 — 10 m / s) ... Capacitatea de încărcare a ascensoarelor de pasageri este de la 320 la 1600 kg, lifturile de marfă - de la 160-5000 kg. La o viteză de până la 1,6 m/sec, motorul electric este conectat la fasciculul de tracțiune printr-o cutie de viteze, dacă viteza este mai mare, atunci se folosesc transmisii electrice fără viteze.

Cu o mare varietate de opțiuni de proiectare pentru lifturile de pasageri și de marfă, principalele dispozitive pentru acestea sunt palanul, cablurile, mașina, contragreutatea, frâna mecanică și echipamentele de control. Lifturile moderne au un sistem de suspensie de contragreutate și o frânghie de contragreutate.

Cabina se deplasează de-a lungul șinelor verticale.Cabina este suspendată de frânghiile care înconjoară firul de remorcare și ghidează scripetele transmisiei troliului electric. La capetele frânghiei se află o contragreutate care se deplasează de-a lungul ghidajelor. Masa contragreutate este egală cu suma masei cabinei și (0,42 — 0,5) a masei încărcăturii (sau jumătate din sarcina cea mai probabilă a cabinei).
Conducerea liftului
În ascensoare și lifturi de marfă, tipurile de acționări electrice sunt selectate în funcție de viteza de mișcare, numărul de etaje ale clădirii și precizia de frânare necesară. În prezent sunt utilizate următoarele acționări electrice:
a) pentru clădirile de până la 17 etaje, se folosesc ascensoare de viteză mică și de mare viteză cu o viteză de 0,7 până la 1,4 m/s cu o capacitate de încărcare de 320, 400 kg. Aceste ascensoare folosesc o acționare electrică cu un motor electric asincron cu două viteze cu un rotor într-o cușcă de veveriță,
b) pentru ascensoarele de pasageri de mare viteză cu o viteză de 1,6 m/s, destinate clădirilor de până la 25 de etaje, o acţionare electrică conform sistemului de reglare a tensiunii tiristoarelor (TRN) cu un motor asincron cu două viteze (TRN-ADD ) este folosit.

Prezența unui antrenament electric reglabil asigură o mare finețe a proceselor de accelerare și decelerare, precizie ridicată a opririi pe podea (până la 20 mm) și absența unei secțiuni cu viteză redusă înainte de oprire. A doua înfășurare a motorului este utilizată pentru a obține o viteză mică în timpul reviziei,
c) pentru ascensoarele de mare viteză și de mare viteză se folosesc antrenări electrice constante după sistemul motor al convertorului tiristor-TP-D și curent alternativ conform sistemului convertizor de frecvență-motor electric asincron în scurtcircuit GGCH-AD.
Acționare electrică a tiristoarelor de la ascensor tip ULMP-25-16
Alimentarea motorului electric (Fig. 1) este realizată de un regulator de tensiune tiristor reversibil UZ (TRN) la pornire și mișcare uniformă și de un redresor separat asamblat conform unui circuit de punte monofazat UZ1 pentru alimentarea înfășurarea statorului în timpul frânării dinamice.
Sistemul asigură controlul parametrilor de fază al vitezei de rotație a unui motor cu inducție în cușcă veveriță. Sistemul de control automat este realizat pe un microcomputer cu un singur cip de tip KR1816VB031, care realizează control digital direct al vitezei de rotație a unui motor electric asincron cu două trepte.
Sistemul de control automat asigură o precizie ridicată a menținerii vitezei setate și opririi la nivelul podelei necesare direct la punctul de referință fără o secțiune cu viteză redusă. A doua înfășurare a motorului este pornită numai în timpul reviziei.
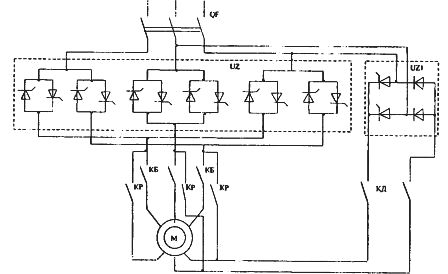
Orez. 1. Schema acționării electrice tiristoare a ascensorului
Solenoizi de frână
Mecanismele de ridicare ale ascensoarelor sunt echipate cu dispozitive speciale de frânare cu electromagneți de curent continuu cu cursă scurtă și cursă scurtă, care sunt conectate la o rețea de 220 sau 380 V printr-un redresor.
Dispozitive de control al liftului
Întrerupătoare de podea concepute pentru comutarea circuitelor de control al mișcării. Aceștia înregistrează poziția mașinii, selectează automat direcția de mișcare («sus» sau «jos») și dau o comandă de a opri motorul electric la frânare.Din punct de vedere structural, acestea sunt întrerupătoare cu pârghie în trei poziții (1-0-2) (dispozitive de control al mișcării) având contacte mobile (pe pârghie) cu contacte fixe (pe corp).
Comutatoarele de podea sunt montate în arbore la nivelul podelei și există o ramură turnată în cabină care acționează asupra pârghiei comutatorului de podea.
Când cabina se mișcă „în sus” prin rotirea pârghiei, un grup de contacte fixe se închide și „în jos” - altul. Când mașina este la nivelul podelei, comutatorul de podea este în poziția neutră «O» și contactele fixe sunt deschise.

Comutatoarele de viteză sunt concepute pentru a da un impuls de reducere a vitezei înainte de a opri vehiculul. Sunt utilizate în ascensoarele de mare viteză cu acţionare electrică cu execuţie în două viteze. Sunt construite pe principiul comutatoarelor de podea, dar au un design diferit. Comutatoarele de viteză sunt instalate în puțul minei ca un set complet deasupra și sub podea, la o distanță de 0,5 până la 0,6 m.
Comutatoarele cu pârghie sunt proiectate pentru a acționa lifturile de marfă controlate. Din punct de vedere structural, acestea sunt comutatoare cu pârghie cu trei poziții cu autoretur al mânerului în poziția neutră ("sus" -0- "jos"), montate în cabină. Prin rotirea mânerului, se selectează direcția de mișcare, care se realizează prin închiderea unei perechi de contacte fixe. Când mânerul este eliberat, contactele se deschid și motorul se oprește (se oprește). Comutatoarele sunt utilizate simultan ca întrerupător de limită în pozițiile finale ale cabinei. Acest lucru se realizează prin acțiunea pârghiei asupra rolei ghidajelor speciale din puțul minei.
Senzori inductivi proiectați pentru utilizare în ascensoare de mare viteză. Diagrama unor astfel de senzori pentru curent alternativ și redresat este prezentată în Fig. 2.
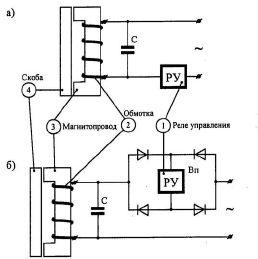
Orez. 2. Schema schematică a senzorilor inductivi de curent alternativ (a) și redresat (b).
Un circuit magnetic laminat în formă de U din oțel 3 este instalat în puțul minei, iar pe cabină există un suport de oțel 4, care este un șunt magnetic. Pe circuitul magnetic există o bobină cu înfășurare 2, la care releul de comandă 1 este conectat direct sau printr-un redresor Vp. Când clema pleacă (circuitul magnetic se deschide), rezistența inductivă a bobinei este mică, ceea ce va asigura funcționarea releului de comandă. Dacă suportul de oțel se suprapune pe circuitul magnetic, rezistența inductivă a bobinei crește brusc și releul este eliberat.
Fiabilitatea și claritatea funcționării releului de comandă este asigurată de includerea capacității C în paralel cu bobina, care este selectată din condiția obținerii unui mod apropiat de rezonanța curenților. Utilizarea unui redresor pentru alimentarea releului de control crește fiabilitatea funcționării sistemului magnetic al releului.
În plus, dispozitivele de contact ermetice (comutatoare cu lame) sunt utilizate pe scară largă în senzorii de călătorie. Utilizarea senzorilor inductivi elimină astfel de dezavantaje ale comutatoarelor de podea și ale comutatoarelor de viteză, cum ar fi zgomotul și interferențele radio care decurg din funcționarea dispozitivelor de contact.
Stratificarea magnetică este un dispozitiv electromagnetic instalat în cabină și care controlează funcționarea încuietorilor ușii minei. Limitatorul magnetic de ramură este conectat la armătura electromagnetului de ramură.Când cabina este pe podea, electromagnetul de ramură este dezaerat, dispozitivul de blocare cu arc dezactivează zăvorul de blocare a ușii minei, permițându-i să se deschidă.
La deplasare, electromagnetul ramurii este alimentat — este introdus zăvorul, care interzice deschiderea ușii. Astfel de încuietori sunt utilizate în ascensoarele de design vechi (sau modernizate) cu funcționare manuală a ușii puțului.

Automatizarea ascensoarelor
Principala diferență între funcționarea ascensoarelor și a palanelor este poziția lor cu mai multe poziții, care se exprimă prin faptul că mecanismele pot ocupa un număr mare de poziții fixe. Prin urmare, după fiecare oprire este necesar să se rezolve problema logică a alegerii următoarei mișcări. Soluția la această problemă este implementată în prezent folosind cipuri logice și microprocesoare. Pentru schema de control al ascensorului sunt stabilite următoarele sarcini: controlul poziției vagonului în puț, selectarea automată a direcției de mișcare, determinarea timpului de pornire a opririi, oprirea precisă a vagonului pe podea, deschiderea automată si inchiderea usilor si protectia actionarilor electrice si liftului.
Semnalele de comandă care stabilesc programul de mișcare al mașinii sunt împărțite în două tipuri: „comenzi” venite de la mașină și „apeluri” venite de la platforma de aterizare. Comenzile sunt date prin intermediul butoanelor situate în cockpit și, respectiv, în zonele podelei. În funcție de răspunsul la comenzi și de metodele de procesare a acestora, schemele de control separate și colective diferă.Cu un principiu de control separat, circuitul percepe și execută o singură comandă și în timpul executării acesteia nu răspunde la alte comenzi și apeluri.
Această schemă este cea mai simplă de implementat, dar limitează posibilele caracteristici ale liftului și, prin urmare, este utilizată numai pentru ascensoarele din clădiri rezidențiale cu înălțime de până la nouă etaje, cu un flux relativ mic de pasageri. Cu principiul controlului colectiv, circuitul primește mai multe comenzi simultan și le execută într-o anumită secvență, de obicei în ordinea etajelor.

Baza sistemului de control al liftului este măsurarea ceasului de podea. Studiul ceasului poate fi un pendul, atunci când fixarea se realizează în două direcții, de jos în sus și de sus în jos, și într-o singură direcție, de exemplu, doar de sus în jos. Leagănul pendul este folosit mai des.