Întoarceți și opriți motorul cu inducție în cușcă de veveriță
Un motor cu inducție este o mașină reversibilă. Pentru a schimba sensul de rotație al rotorului, este necesar să schimbați sensul de rotație a câmpului magnetic (prin comutarea firelor de alimentare la bornele celor două faze ale motorului) - Circuite de pornire și frânare a motorului
Caracteristicile mecanice pentru două direcții de rotație sunt prezentate în Fig. 1.
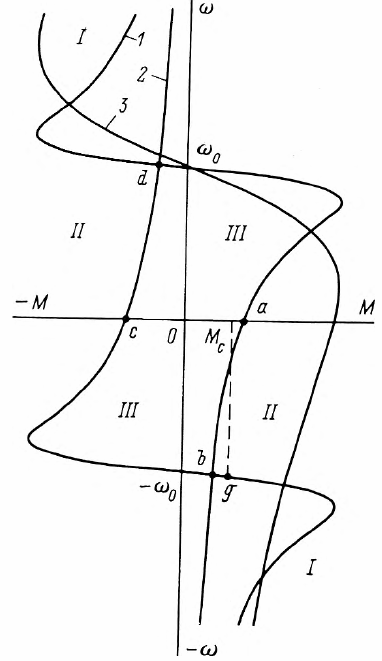
Orez. 1. Familia de caracteristici mecanice ale unui motor cu inducție pentru funcționare reversibilă în regim de oprire cu alimentare cu energie la rețea (I), regim de opoziție (II) și motor (III) 1, 2 — natural; 3 — artificială.
Un motor cu inducție în cușcă de veveriță poate fi folosit nu numai ca motor, ci și ca frână. În modul de oprire, fiecare motor electric funcționează întotdeauna ca un generator. În acest caz, un motor electric cu inducție cu rotor cu colivie poate avea trei moduri de frânare.
În modul de frânare regenerativă, mașina funcționează cu alunecare negativă. În acest caz, viteza rotorului depășește viteza de rotație a câmpului magnetic.Desigur, pentru a trece la acest mod, trebuie aplicat un moment activ extern pe partea laterală a arborelui.
Modul feed-back este utilizat pe scară largă în instalațiile de ridicare. În timpul coborârii, sistemul de propulsie, datorită energiei potențiale a sarcinii, poate dobândi o viteză care depășește viteza de rotație a câmpului magnetic, iar coborârea se va produce într-o stare de echilibru corespunzătoare unui anumit punct g pe caracteristica mecanică. , când momentul static creat de sarcina descendentă, este echilibrat de cuplul de frânare a motorului.
La acționările convenționale cu cuplu static reactiv, modul în cauză este implementat numai prin intermediul circuitelor speciale de control, care fac posibilă reducerea vitezei de rotație a câmpului magnetic. Caracteristicile mecanice ale unei mașini cu inducție pentru modul feed-back sunt prezentate în aceeași figură. 1.
După cum se arată, cuplul maxim în modul generator este puțin mai mare decât în modul motor, iar alunecarea critică în valoare absolută este aceeași.
Generatoarele asincrone ca atare au o gamă foarte îngustă și anume centrale eoliene... Deoarece forța vântului nu este constantă și, în consecință, viteza de rotație a dispozitivului se modifică semnificativ, un generator asincron este de preferat în aceste condiții.
Cel mai utilizat este modul de frânare — opoziție. Trecerea la acest mod de motoare asincrone, precum și motoare de curent continuu, este posibilă în două cazuri (Fig. 1): cu o creștere semnificativă a cuplului static (secțiunea ab) sau la comutarea înfășurării statorului pentru o direcție diferită de rotație ( sectiunea cd).
În ambele cazuri, motorul funcționează cu o alunecare mai mare de 1 până când curenții depășesc curenții de pornire. Prin urmare, pentru un motor cu colivie, acest mod poate fi folosit doar pentru a opri rapid unitatea.
Când se atinge viteza zero, motorul trebuie deconectat de la rețea, altfel va tinde să accelereze în direcția opusă.
La frânarea cu motoarele cu rotor bobinat opus, în circuitul rotorului trebuie introdusă o rezistență reostat pentru a limita curentul și a crește cuplul de frânare.
De asemenea, este posibil modul de frânare dinamică… Cu toate acestea, acest lucru ridică unele dificultăți. Când motorul este deconectat de la rețea, câmpul magnetic al mașinii dispare și el. Este posibilă excitarea unei mașini de inducție de la o sursă de curent continuu care este conectată la un stator deconectat de la rețeaua de curent alternativ. Sursa ar trebui să furnizeze un curent în înfășurarea statorului aproape de nominal. Deoarece acest curent este limitat doar de rezistența electrică a bobinei, tensiunea sursei de curent continuu trebuie să fie scăzută (de obicei 10 — 12 V).
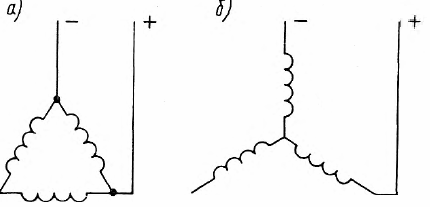
Orez. 2. Conectarea statorului unui motor cu inducție la o sursă de curent continuu în modul de frânare dinamică atunci când este conectat în triunghi (a) și stea (b)
Autoexcitarea este folosită și pentru frânarea dinamică. Condensatorii sunt conectați la statorul deconectat de la rețea.
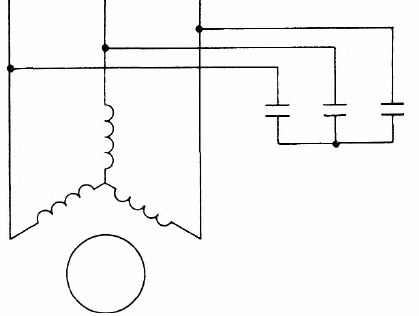
Orez. 3. Schema frânării dinamice a unui motor cu inducție autoexcitat
Pe măsură ce rotorul se rotește, se creează un EMF în circuitul statorului datorită magnetizării reziduale și fluxului de curent prin înfășurările statorului, precum și prin condensatori.Când se atinge o anumită viteză în circuitul statorului, apar condiții de rezonanță: suma rezistențelor inductive va fi egală cu rezistența capacitivă. Va începe un proces intens de autoexcitare a mașinii, ceea ce va duce la o creștere a EMF. Modul de autoexcitare se va încheia atunci când EMF-ul mașinii E și căderea de tensiune pe condensatoare sunt egale.
Cuplul de frânare maxim cu creșterea capacității se schimbă la viteze mai mici. Dezavantajele modului de frânare considerat sunt apariția acțiunii de frânare numai în cadrul unei anumite zone de viteză și nevoia de a folosi condensatoare mari pentru frânarea la viteze mici.
În plus, nu este necesară nicio sursă suplimentară de energie electrică. Acest mod este întotdeauna implementat în instalațiile în care o bancă de condensatoare este conectată la motor pentru a îmbunătăți factorul de putere al rețelei de alimentare.
Vezi și pe acest subiect: Circuite de frânare pentru motoare asincrone