Controlere electrice indirecte
 Controlerele electrice și electronice folosesc energie electrică pentru a controla unitatea.
Controlerele electrice și electronice folosesc energie electrică pentru a controla unitatea.
Pentru a crea sisteme automate de control pozițional în turnătorii și atelierele termice, se folosesc dispozitive în serie de diferite modificări echipate cu dispozitive de contact electric. Traductoarele releu (bimetalice, dilatometrice etc.) pot fi utilizate pentru controlul poziției.
Circuitul de control al temperaturii pornit-oprit
În schema de reglare a temperaturii în două poziții în cuptorul de uscare (Fig. 1), sistemul de încălzire al cuptorului de uscare este aranjat astfel încât, dacă temperatura din spațiul de lucru devine mai mică decât cea permisă, atunci încălzirea elementele EK1 trebuie pornite la putere mare, iar dacă temperatura devine mai mare decât cea admisă, atunci elementele EK2 cu putere mică.
Un termometru cu rezistență 1 este utilizat ca element sensibil conectat la o punte electronică 2 într-un circuit cu trei fire.Dacă temperatura din cuptor se abate de la valoarea setată, atunci rezistența electrică a termometrului se va modifica și va apărea un semnal de dezechilibru în diagonala podului.
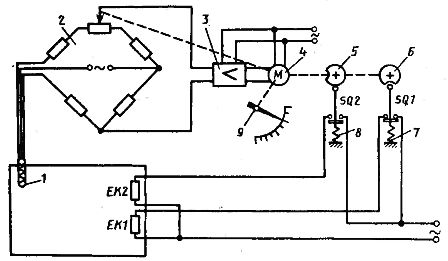
Orez. 1. Schema unui regulator electric de temperatură cu două poziții
Semnalul amplificat de amplificatorul electronic 3 antrenează rotația motorului inversor 4. Sensul de rotație al acestuia depinde de semnul dezechilibrului, adică de semnul abaterii temperaturii de la valoarea setată. Două discuri sunt conectate cinematic la rotorul motorului electric: 5 și b, a căror poziție depinde de unghiul de rotație al rotorului, prin urmare, de poziția firului de alunecare și a săgeții 9 a podului.
Ghidajele contactelor SQ1 și SQ2 sunt presate pe discuri prin intermediul arcurilor 7 și 8. Când discurile se rotesc, contactul SQ2 este închis în intervalul citirilor instrumentului de la începutul scalei până la valea discului. 5 și este deschisă în intervalul de la vale până la maximul stâncii. Contactul SQ1, dimpotrivă, este deschis de la începutul scalei până la valea discului 6 și este închis în intervalul de la vale până la maximul scalei.
Când se atinge limita inferioară de temperatură, contactul SQ1 se închide și elementele de încălzire de mare putere EK1 sunt pornite. Când este atinsă limita superioară de temperatură, contactul SQ2 se închide și contactul SQ1 se deschide, determinând scăderea lent a temperaturii. De îndată ce se atinge limita inferioară de temperatură, situația se va repeta și așa mai departe.
În fig. 2 prezintă o schemă de circuit de reglare a temperaturii în două poziții în spațiul de lucru al unui cuptor cu cameră tip SNZ-4,0.8,0.2,6 / 10 cu atmosferă protectoare. Cuptorul este trifazat și conectat la cuptor prin siguranțe FU.Elementele de încălzire sunt pornite și oprite cu ajutorul unui contactor. Stabilizarea temperaturii este asigurată de un sistem de control automat (ACS).
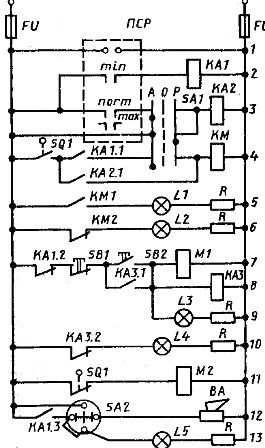
Orez. 2. Circuit electric pentru reglarea temperaturii spațiului de lucru al unui cuptor electric cu cameră cu atmosferă protectoare
Circuitul de control este format din 13 circuite. Pe baza caracteristicilor lor funcționale, acestea pot fi împărțite în circuite de control, circuite de protecție și circuite de informații. Controlul se realizează prin: temperatura din spațiul de lucru al cuptorului (automat și manual în caz de defecțiune a sistemului de control automat), furnizarea unei atmosfere de protecție a cuptorului, alimentarea unei perdele de gaz. Schemele de informații sunt utilizate pentru a avertiza personalul de exploatare despre diferitele moduri de funcționare ale cuptorului prin intermediul semnalelor luminoase și sonore.
Cuptorul are o singură zonă Reglarea temperaturii se realizează cu ajutorul unui sistem de control automat format dintr-un termocuplu, fire de compensare, potențiometru PSR, relee intermediare KA1 și KA2, contactor KM și în final cuptorul propriu-zis SNZ-4,0.8,2.6 / 10 . Potențiometrul PSR este conectat la circuitul de control folosind circuitele 1, 2 și 3. Circuitul 1 servește la alimentarea dispozitivului PSR în sine.
Circuitele 2 și 3 conțin contactele minime (min.) și normale (normale) ale termostatului PSR. Contactul maxim (max) al PSR nu este utilizat în circuit. In circuitele 2 si 3 se genereaza un semnal de comanda care, cu ajutorul releelor intermediare KA1 si KA2, este amplificat la valoarea necesara actionarii bobinei de antrenare (contactor KM). Astfel, KA1 și KA2 acționează ca amplificatoare de semnal de putere.
Circuitele 3 și 4 au contacte universale de comutare cu trei poziții: automat (A), oprit (O) și manual (P). Fiecare dintre aceste poziții corespunde unui anumit mod de funcționare al cuptorului: control automat al temperaturii în cuptor, cuptorul este oprit, control manual al temperaturii (numai la reglarea modurilor sau în caz de defecțiune a sistemului de control automat) .
Circuitul 4 include contactorul și, prin urmare, încălzitoarele în sine. Contactorul poate fi pornit numai dacă ușa cuptorului este închisă. Acesta din urmă este asigurat de introducerea în circuitul 4 a comutatorului de limită SQ1, care este oprit la deschiderea ușii cuptorului. Pornirea directă a bobinei contactorului și, în consecință, a contactelor acesteia se realizează astfel: cu control automat — prin contactele releelor intermediare KA1 și KA2, cu control manual — numai folosind contactele KA2.1.
Bobina KA1 este pornită numai când temperatura din cuptor atinge o valoare minimă. Bobina KA2 este conectată la contactul corespunzător temperaturii normale din cuptor. Prin urmare, elementele de încălzire ale cuptorului rămân aprinse chiar și atunci când temperatura cuptorului devine egală cu punctul de referință. Încălzitoarele sunt deconectate de la rețea numai atunci când temperatura în cuptor crește peste norma. Așa sunt compuse circuitele care controlează stabilizarea temperaturii în cuptor.
Indiferent dacă cuptorul este pornit sau oprit în acest moment, suntem informați de două lămpi de semnalizare: L1 și L2. Când elementele de încălzire sunt aprinse, lampa de semnalizare L1 este aprinsă, iar când încălzitoarele sunt oprite, lampa L2 este aprinsă. Acest lucru se realizează prin conectarea contactelor contactorului KM în circuitele 5 și b.Rezistoarele R din circuitele 5 și 5 sunt necesare pentru a scădea tensiunea în lămpile de semnalizare de la 220 V la tensiunea de funcționare (rezistoarele din circuitele lămpii joacă rolul de rezistențe de sarcină). Circuitele 7, 8 și 11 sunt proiectate pentru a controla alimentarea cu atmosferă de protecție și perdeaua de gaz.
Circuitul conține electrovalve M1 și respectiv M2 pentru alimentarea atmosferei protectoare și alimentarea cu gaz pentru a crea o perdea de gaz în cuptor.
După cum se poate observa din structura circuitului 7, este posibilă furnizarea unei atmosfere de protecție a cuptorului numai dacă temperatura din cuptor nu a scăzut la minimum (când KA1 este pornit, circuitul 7 se deschide prin contactul KA1. 2. ). Acest sistem este un sistem de protecție împotriva exploziilor. Alimentarea cu gaz a cuptorului este controlată manual cu ajutorul butoanelor SB1 și SB2. Releul KAZ este introdus pentru a multiplica contactele, deoarece M1 nu are contacte de blocare.
Când M1 (precum și KAZ) este pornit, lampa de semnalizare L3 se aprinde în același timp, anunțând personalul de service că supapa de gaz este deschisă. Oprirea gazului (folosind butonul SB1) este însoțită de oprirea și L3, în timp ce o altă lampă de semnalizare se aprinde - L4, care informează că supapa este închisă.
Circuitele 12 și 13 sunt informative. Folosind comutatorul de pachet SA2, puteți porni sirena, anunțând personalul de service că temperatura din cuptor a scăzut la valoarea minimă, ceea ce este un semn al unui fel de defecțiune (încălzitoarele ar fi trebuit să se pornească chiar și la temperatura normală ).
Astfel, contactul minim min PSR este utilizat într-o schemă diabolică nu numai ca senzor de stabilizare a temperaturii în spațiul de lucru al cuptorului, ci și ca senzor în sistemul automat de avertizare și protecție.Sistemul de avertizare automată poate fi oprit prin deplasarea comutatorului în a doua poziție (circuitul 13). Lampa L5 semnalează că sistemul automat de avertizare este dezactivat.

Circuit de control al temperaturii cu trei poziții
Într-un regulator cu trei poziții, regulatorul are o a treia poziție, în care, atunci când valoarea variabilei controlate este egală cu cea dată, obiectul este alimentat cu o cantitate de energie și materie necesară pentru funcționarea sa normală. .
Circuitul de control cu trei poziții poate fi obținut printr-o conversie a circuitului de control cu două poziții considerat (vezi Fig. 1), dacă trei relee intermediare sunt controlate folosind contactele SQ1 și SQ2. Când contactul SQ1 este închis, releul K1 se pornește; când SQ2 este închis, releul K2 este activat. Dacă ambele contacte SQ1 și SQ2 sunt deschise, atunci releul de scurtcircuit este activat. Cu ajutorul acestor trei relee, elementele de încălzire pot fi pornite cu delta, stea sau oprite, adică pentru a efectua controlul temperaturii în trei poziții.
Pentru a crea sisteme automate de control care aplică o lege de control proporțională, este adesea folosit un releu echilibrat de tip BR-3. Acest releu folosește două fire de alunecare. Valoarea variabilei controlate determină poziția glisierei unei glisiere (senzor) și gradul de deschidere a corpului de reglare - poziția glisierei glisierei actuatorului (feedback).
Sarcina releului echilibrat este de a avea un astfel de efect asupra acționării încât pozițiile glisoarelor celor două glisoare să fie simetrice.
În schema releului echilibrat BR-3 (Fig.3) elementele principale sunt releul polarizat RP-5 și releele de ieșire BP1 și BP2. În timp ce pozițiile glisierelor sunt simetrice, forțele curentului care curge în cele două bobine ale releului polarizat sunt egale și, prin urmare, contactele acestuia sunt deschise. Releele de ieșire BP1 și BP2 sunt dezactivate și contactele lor executive sunt deschise.
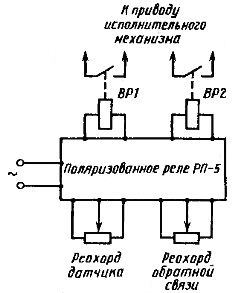
Orez. 3. Schema bloc simplificată a unui releu echilibrat tip BR-3
În cazul unei abateri a valorii controlate (de exemplu, la creștere), poziția glisorului cursorului senzorului este modificată. Ca urmare, simetria punții și echilibrul curentului care curge prin înfășurările releului polarizat sunt perturbate și contactul corespunzător este închis. În acest caz, releul de ieșire este activat, ale cărui contacte includ unitatea, care mișcă corpul de reglare în direcția scăderii valorii controlate. Glisorul de feedback se mișcă în același timp.
Acționarea funcționează până când glisorul firului de glisare de feedback ocupă poziția roții de glisare a senzorului, după care apare din nou echilibrul. Contactele releului se deschid și unitatea se oprește. Aceasta oferă o relație constantă între valoarea variabilei controlate și poziția controlerului.
Pentru a crea sisteme de control automate care aplică legile I-, PI- și alte legi, sunt utilizate diverse controlere electronice, care includ regulatoare de tip IRM-240, VRT-2, EPP-17 etc.