Echipamente electrice pentru gatere
 În fabrici de cherestea, principalul echipament pentru tăierea cheresteașului rotund în scânduri, grinzi și alte sortimente este echipamentul principal pentru gatere.
În fabrici de cherestea, principalul echipament pentru tăierea cheresteașului rotund în scânduri, grinzi și alte sortimente este echipamentul principal pentru gatere.
Cadrul de ferăstrău este o mașină cu ferăstrău multiplu cu ferăstrăile întinse într-un cadru rigid. Gaterelele verticale sunt fabricate cu etaj simplu și dublu, deschideri înguste și largi, cu jogging și alimentare continuă. Cele mai recente rame de cherestea au între trei și șase motoare electrice. Viteza de rotație a arborelui cotit - de la 200 la 600 min–1, antrenarea este efectuată de un motor asincron cu un rotor bobinat și, uneori, de un motor cu rotor cu colivie.
Pe cadrul ferăstrăului (Fig. 1), în tăietura frunții sunt tăiați bușteni cu o lungime de 3,2–9 m și un diametru de 65 cm. Cadrul din fontă al cadrului este format din două picioare și pereți laterali legați unul de celălalt prin conexiuni transversale.
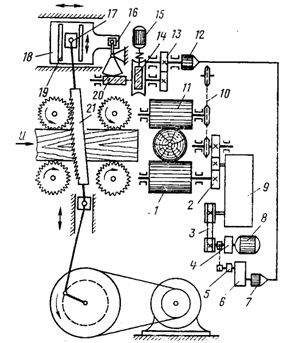
Orez. 1. Schema cinematică a cadrului gaterului
Cadrul fabricii de cherestea este montat pe o placă de bază. Un arbore cotit cu două volante și un scripete de antrenare se rotește în doi rulmenți principali montați pe o placă.Tija de legătură a grinzii I este conectată cu capul inferior la știftul arborelui cotit printr-un rulment cu role, iar capul superior este conectat la știft prin traversa inferioară a cadrului ferăstrăului prin rulmentul cu ace.
Traversele inferioare și superioare ale cadrului ferăstrăului sunt conectate prin suporturi tubulare rotunde. Glisoarele de textolit cu știfturi de pe traversele cadrului ferăstrăului sunt conectate prin rulmenți cu role conice.
Designul cadrului ferăstrăului permite utilizarea unui întinzător hidraulic. Din cele opt ghidaje ale sale, patru sunt prismatice și patru sunt plate, care sunt atașate în perechi de plăci din fontă montate pe pat. Plăcile de ghidare superioare sunt montate pe un glisier și sunt deplasate de mecanismul de înclinare al cadrului ferăstrăului, în funcție de dimensiunea parcelei Δ.
Acționarea individuală a mecanismului de alimentare cu patru role, constând dintr-un antrenament cu tiristor, asigură o reglare lină a vitezei de alimentare a buștenii. Cuplul este transmis rolelor inferioare 1 de la motorul 8 printr-un electromagnet, un ambreiaj electromagnetic 4, o transmisie cu curea 3, o cutie de viteze 9 și roți dințate 2. Rolele superioare 11 se rotesc printr-un lanț cu role 10.
Mărimea pachetelor este reglată prin schimbarea glisamentului ambreiajului electromagnetic 4, realizată prin rotirea cadranului regulatorului centrifugal 5. În acest scop, operatorul pornește servomotorul 15, rotind cadranul la unghiul corespunzător, rotația este efectuată de angrenajul melcat 14, angrenajele 13, senzorul selsyn 12, receptorul selsyn 7 și reductorul 6.Prin schimbarea încăperii Δ simultan prin angrenajul melcat 20 și pârghia 16, placa 18 se deplasează în plan orizontal cu ghidajele 19 ale glisierei superioare 17 a cadrului ferăstrăului și se modifică înclinarea ferăstrăului 21.
În fig. 2. Echipamentul său electric este alcătuit din motor asincron M1 de antrenare a arborelui principal de 125 kW, motor M2 de antrenare a mecanismului de înclinare a cadrului ferăstrăului, motorul stației hidraulice MZ, motorul pompei de lubrifiere M4 și sistem de control automat, bazat pe un tiristor cu motor DC M5.
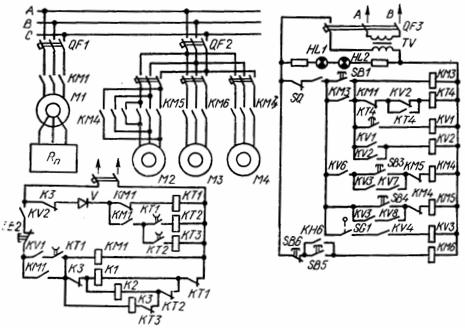
Orez. 2. Schema electrică a cadrului gaterului 2P80
Protecția la curent maxim a motoarelor este asigurată de întrerupătoarele automate: QF1 — motor M1, QF2 — motoare M2, MZ, M4 și QF3 — circuite de comandă.La pornirea QF3 se aprind lămpile de avertizare HL1 și HL2. Motorul arborelui principal M1 este pornit folosind contactorul liniar KM1, iar motorul de antrenare al motorului de alimentare M5 este pornit cu contactorul KM2.
Circuitul electric de control include: circuite de putere (motoare de antrenare); circuite de control releu-contactor și circuite ale sistemului de control automat bazat pe tiristoare DC. Pentru a porni pornirea antrenării cadrului ferăstrăului atunci când poarta superioară este deschisă, arborele principal și benzile de siguranță ale curelei trapezoidale sunt îndepărtate, iar când cadrul ferăstrăului este oprit, se folosesc întrerupătoare de limită (al căror bloc este indicat în Fig. 2). cu literele SQ).
Pornirea motorului M1 cu un rotor bobinat se realizează în funcție de timp prin închiderea secvențială a releelor de accelerație KT1, KT2 și KT3, care, cu o întârziere dată, produc treptat trei trepte ale reostatului de pornire Rp folosind contactoarele K1, K2. și K3.
Apăsând butonul de pornire SB1 (vezi fig. 2) se pornește bobina contactorului KM3, care închide contactele de putere KM3 ale motorului M4 ale pompei de ulei, contactul de închidere KM3 ocolește butonul SB1.
Motorul principal de mișcare M1 este pornit când contactul KV1 al releului intermediar KV1 este închis. Bobina acestui releu primește putere prin contactul KT4 al releului de timp KT4, care atunci când este închis se va închide cu o întârziere. Prin urmare, releul KT4 asigură o întârziere între pornirea motorului M4 și M1.
Când releul KV1 este pornit, releul KV2 pornește simultan, contactul de închidere al cărui KV2 alimentează bobina contactorului KM1. Bobina KM1, după ce primește energie, pornește contactele principale KM1 ale circuitului de putere al motorului M1, iar rotorul motorului va începe să se rotească atunci când reostatul de pornire este setat complet. După ce contactoarele de accelerație K1, K2 și K3 funcționează cu decelerare, rotorul motorului se va roti la viteza maximă.
Când pornirea motorului M1 este completă, contactul de deschidere K3 va întrerupe simultan circuitul de alimentare al contactoarelor K1 și K2, iar contactul K3 din circuitul de pornire a motorului al alimentatorului M5 se va închide și îl va pregăti pentru pornire. Motorul este oprit prin apăsarea butonului SB2.
Sistemul hidraulic asigură ridicarea și coborârea ușilor din față și din spate, pe carcasele sudate ale cărora sunt montate rolele superioare de alimentare.Portile sunt ridicate in pozitia superioara de cilindri hidraulici actionati de o statie hidraulica. Acționarea stației hidraulice este asigurată de motorul M3, care este pornit la apăsarea unui buton, în timp ce bobina KM6 a demarorului este alimentată, care închide contactele principale ale KM6.
Înclinarea cadrului ferăstrăului poate fi controlată manual (prin apăsarea butoanelor SB3 și SB4) sau automat. Cu controlul automat al înfășurării KM4 a demarorului KM4 ("mai mult") și KM5 al demarorului KM5 ("mai puțin"), aceștia primesc putere prin releul KV3, care se aprinde atunci când comutatorul de mod este în poziția "Automat" , adică atunci când contactul SQ1 este închis.
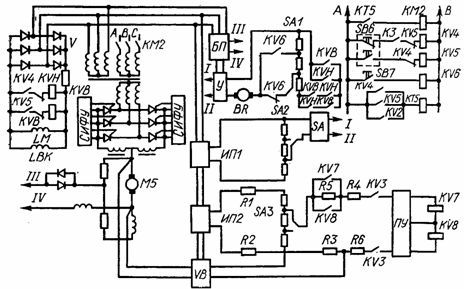
Sursa de alimentare cu tiristoare constă dintr-un motor DC M5 și un convertor tiristor. Convertorul tiristor (Fig. 9.2, c) este pornit de demarorul KM2, prin contactul KV3, a cărui bobină primește putere atunci când contactul releului de timp KT5, care se află în circuitul său, este închis. Releul de sincronizare KT5 va fi alimentat atunci când bobinele KV4 (mișcare înainte) sau KV5 (mișcare inversă) sunt alimentate.
Dacă bușteniul se blochează în timpul tăierii, acesta este retras prin inversarea motorului. Pornirea motorului de alimentare nu este posibilă fără pornirea motorului M1. Acest lucru este asigurat prin includerea contactului K3 în circuitul de alimentare KV4, care se închide după terminarea pornirii motorului M1. Când demarorul KM2 este pornit, convertorul și înfășurările de câmp LM ale motorului sunt alimentate.
Dacă registrul este blocat, apăsarea butonului SB6 oprește releele KV4 și KVB și se pornesc releele KV5 și KVH.În acest caz, releul KVH își închide contactele în circuitul de alimentare al amplificatorului U, care este inclus în convertorul tiristor, ca urmare, polaritatea tensiunii la ieșirea convertorului se schimbă, iar motorul schimbă direcția de rotație.

Stabilitatea vitezei de rotație la schimbarea sarcinii este asigurată de un feedback negativ, care este implementat de un tahogenerator BR cu bobină de excitație LBL. Armatura BR este conectată la intrarea amplificatorului V. Tranzitoriul este forțat de utilizarea frânării regenerative în circuitul convertorului tiristor.
Viteza de avans este reglată manual și automat. Pentru aceasta, comutatorul SA este setat. În reglarea manuală a vitezei de alimentare, regulatorul de viteză este conectat la amplificatorul U prin circuitele I și II. Controlerele de viteză SA1 - SA3 sunt comutatoare la panouri la care sunt conectate rezistențe MLT.
Mișcarea contactului mobil SA1 schimbă semnalul de control care intră în sistemul de control puls-fază (SPPC) prin amplificatorul PU, care modifică unghiul de aprindere al tiristoarelor conectate printr-un circuit redresor în punte, datorită căruia se modifică turația motorului M5.
Pentru a regla automat viteza motorului M5 prin comutatorul SA, SA1 este deconectat de la blocul amplificator Y și conectat la amplificatorul Y SA2 - senzorul diametrului jurnalului. În acest caz, SA1 începe să primească putere de la SA2, care este un potențiometru conectat la sursa de alimentare stabilizatoare IP1 și rotit de mecanismul de comutare a puterii.
Când se modifică diametrul bolțului, glisorul potențiometrului SA2 se mișcă și valoarea tensiunii de control aplicată la SA1 se modifică, prin urmare viteza de avans se modifică odată cu modificarea diametrului bolțului. Valoarea vitezei trebuie să se potrivească cu panta cadrului ferăstrăului, viteza este controlată prin comutarea SA3.
Senzorul de înclinare a cadrului ferăstrăului SA3 este conectat la o sursă de alimentare stabilizată IP2 prin rezistențele R1 și R2. Rezultatul este o solicitare proporțională cu unghiul de înclinare a cadrului ferăstrăului. Această tensiune este comparată cu tensiunea motorului M5, proporțională cu viteza, preluată din armătura motorului și alimentată la rezistorul R3 prin blocul redresor VB, se scade din tensiunea de ieșire a senzorului de înclinare a cadrului ferăstrăului.
Cu motorul în marșarier, blocul VB menține o polaritate de referință constantă. Semnalul de nepotrivire este alimentat la intrarea amplificatorului intermediar PU prin rezistențele R4 — R6 și contactele de închidere KV3 (închise în timpul reglajului automat). Semnalul este amplificat și transmis la ieșirea PU, la care sunt conectate releele KV7 și KV8. Acestea sunt declanșate în funcție de polaritatea semnalului de intrare de eroare.
Deci, pe măsură ce viteza de avans crește, tensiunea îndepărtată de la motor crește și valoarea nepotrivirii este negativă. În acest caz, relația dintre viteza de avans și înclinarea cadrului ferăstrăului este ruptă. Semnalul de ieșire amplificat de la amplificatorul PU include releul KV7, ale cărui contacte de închidere includ bobina KM4.
Contactele de închidere KM4 rotesc motorul M2 „înainte” — crescând înclinarea cadrului ferăstrăului.În același timp, tensiunea de ieșire la SA3 este crescută prin deplasarea cursorului potențiometrului. Semnalul de abatere începe să scadă la zero, după care se oprește creșterea înclinării cadrului ferăstrăului. Aceasta menține o potrivire între viteza de avans și unghiul cadrului ferăstrăului.
Procesul de control se desfășoară într-un mod similar cu o scădere a vitezei de avans, dar semnalul de eroare în acest caz are un semn pozitiv. Acest lucru face ca releul KV8 să se pornească, precum și KM5 și motorul M2 să se inverseze. Pe măsură ce viteza de avans scade, scade și panta cadrului ferăstrăului. În timpul reglării, contactele de acționare KV7 și KV8 ocolesc rezistența R5, ceea ce face posibilă forțarea procesului.
La începutul tăierii, este necesar să aveți o viteză de tăiere egală cu cel mult 30% din viteza de avans de lucru. Acest lucru se face în felul următor. Prin apăsarea butonului SB7, releul KV6 este alimentat, ale cărui contacte sunt comutate la ieșirea SA1, astfel încât o mică tensiune de comandă este furnizată prin contactul de închidere KV6 la intrarea convertorului tiristor, ceea ce creează o viteză de tăiere mică. .
După terminarea avansului, butonul SB7 este oprit și aparatul intră în modul de lucru.Întreruperea sistemului de control automat pentru înclinarea cadrului ferăstrăului în timpul avansului este asigurată prin conectarea contactului de închidere KV6 la circuitul de alimentare. a bobinelor de pornire KM4 și KM5.