Acționare electrică a cărucioarelor cu macarale rulante
Un cărucior cu macara rulantă este un element independent al unui dispozitiv de ridicare și este proiectat pentru a deplasa sarcini în raza macaralei rulante cu o viteză de deplasare determinată tehnologic și cu precizia necesară de poziționare a sarcinii. Acționarea boghiului este una dintre componentele principale ale echipamentului macaralei rulante.
Căruciorul se deplasează pe șina unui rulant rulant. Podul în sine se mișcă într-o direcție perpendiculară pe direcția de mișcare a căruciorului. Pe cărucior este instalat un mecanism de ridicare, care este echipat cu un cârlig (sau electromagnet) cu care puteți muta sarcina. Mișcarea boghiului este parte integrantă a ciclului tehnologic al macaralei rulante (Fig. 1).
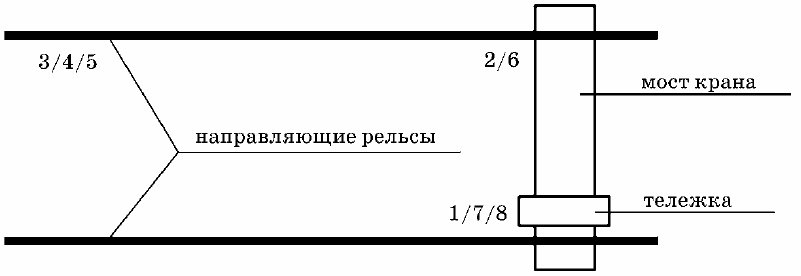
Orez. 1. Schema efectuarii operatiilor cu macara pod in ciclu de lucru
Acest ciclu constă din următoarele operații (în Figura 1, numerele operațiunilor sunt afișate în cifre):
1 — ridicarea sarcinii;
2 — mutarea căruciorului într-o poziție dată;
3 — deplasarea macaralei într-o poziție prestabilită;
4 — reducerea greutății sarcinii;
5 — ridicarea cârligului cu greutatea încărcăturii;
6 — mutarea macaralei în poziția inițială;
7 — mutarea căruciorului în poziția inițială;
8 — coborârea cârligului.
După cum se poate observa din ciclul de proces al macaralei, motorul de antrenare al căruciorului este pornit în a doua și a șaptea operație. Atunci când boghiul se apropie de o anumită poziție în distanța macaralei rulante, motorul electric al acționării boghiului este frânat electric pentru a asigura precizia de frânare necesară.
Motorul este apoi oprit și se aplică o frână mecanică. În plus, acționarea electrică a mișcării podului este pornită și sarcina se deplasează de-a lungul atelierului în funcție de sarcina tehnologică. Ajungând la locul desemnat, macaraua se oprește, sarcina este coborâtă și apoi se efectuează operațiunile tehnologice necesare.

Schema cinematică a mecanismului de deplasare a căruciorului cu macarale rulante este prezentată în Figura 2. Mecanismul de deplasare a căruciorului este realizat conform schemei cu o cutie de viteze la mijloc între roțile motoare.
Acționarea de la motorul electric D prin discul de frână T, cutia de viteze P, ambreiajele M și arborii B este transmisă roților de rulare. Un scripete de frână este folosit pentru a menține căruciorul staționar.
Căruciorul are patru roți de călătorie și două roți motrice. Roțile de rulare ale cărucioarelor cu macara sunt de obicei realizate cu două nervuri.
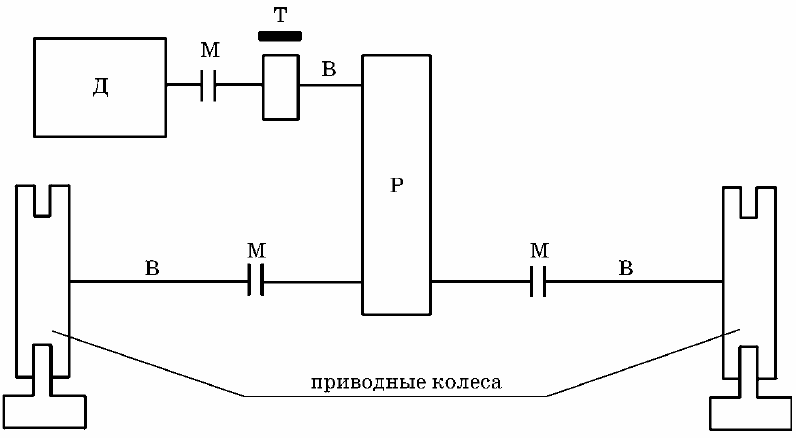
Orez. 2. Schema cinematică a mecanismului de deplasare a căruciorului
Timpul de mutare a căruciorului în poziția specificată va fi determinat luând în considerare timpul de accelerare și decelerare a căruciorului cu accelerația necesară.Pe baza condițiilor procesului tehnologic, tahograma la mutarea căruciorului ar trebui să aibă forma prezentată în Figura 3.
Este necesar să se asigure o pornire lină a mecanismului boghiului la o viteză dată cu accelerația necesară. Pentru a asigura precizia de poziționare necesară, este necesară o decelerare lină a acționării electrice cu trecerea la viteză redusă, după care căruciorul se oprește.
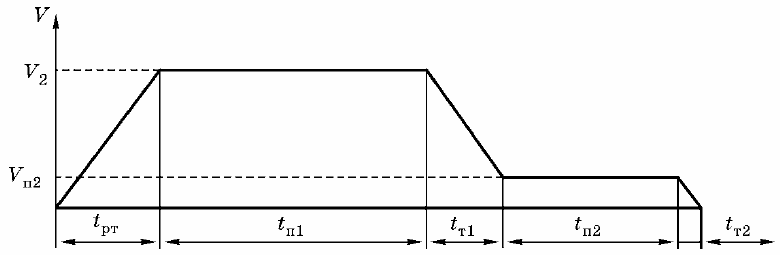
Orez. 3. Tahograma mecanismului de deplasare a căruciorului
Mișcarea boghiului cu impacturi asupra structurii metalice din îmbinările șinei, accelerarea și decelerația intensă, vibrațiile naturale ale structurii metalice la încărcarea mașinilor provoacă impacturi mecanice foarte intense asupra echipamentelor electrice amplasate pe boghiul macaralei pod. Pe baza acestui fapt, acționarea electrică pentru deplasarea căruciorului trebuie să îndeplinească următoarele cerințe:
1) acționarea electrică trebuie să ofere capacitatea de a porni mecanismul în mișcare, de a inversa direcția de mișcare și de a opri mecanismul cu accelerația necesară (m / s2) și precizia de poziționare corectă (mm);
2) acționarea electrică trebuie să asigure un control fluid al vitezei în jos de la principal;
3) cuplul motor dezvoltat trebuie să asigure funcţionarea mecanismului la o intensitate dată;
4) la un anumit număr de porniri ale motorului pe oră, nu ar trebui să existe o supraîncălzire a înfășurărilor sale, datorită căreia este posibilă o oprire prelungită a mecanismului;
5) motorul trebuie selectat în conformitate cu condițiile de funcționare, adică trebuie să aibă un design adecvat, iar înfășurările sale trebuie să fie rezistente la căldură și să aibă izolație împotriva umezelii;
6) motorul de antrenare trebuie să aibă cele mai mici mase de volantă care au un impact semnificativ asupra fluxului de tranzitori în timpul pornirilor frecvente ale conducerii;
7) motorul de antrenare trebuie să se potrivească cu puterea mecanismului de rulare și să aibă capacitatea de suprasarcină necesară;
8) actionarea electrica trebuie sa asigure formarea proceselor tranzitorii cu durata minima;
9) siguranța și ușurința întreținerii trebuie luate în considerare în proiectarea acționării electrice.

Momentul static pentru mecanismele de mișcare care funcționează pe o linie de cale orizontală într-o unitate de producție este creat de forțele de frecare de alunecare în rulmenți și de frecarea de rulare a roților boghiului care rulează pe șinele macaralei rulante. Momentul static al mecanismului în timpul mișcării înainte a căruciorului este determinat de capacitatea de ridicare a macaralei. Momentul static al mecanismului în timpul mișcării inverse a boghiului este calculat pentru o sarcină incompletă.
Pentru acţionarea electrică a căruciorului macaralelor rulante, motoare asincrone cu rotor cu colivie (inclusiv ca parte a unui variator de frecvență), motoarele cu inducție cu rotor bobinat și motoarele de curent continuu excitate independent.