Diagrame de actuatoare electrice cu un motor electric
 Actuatoarele electrice cu un motor electric sunt proiectate pentru a deplasa diferite corpuri de supape de închidere și control a conductelor cu un principiu de acțiune rotativ (supape cu bilă și dopuri, supape de accelerație, amortizoare).
Actuatoarele electrice cu un motor electric sunt proiectate pentru a deplasa diferite corpuri de supape de închidere și control a conductelor cu un principiu de acțiune rotativ (supape cu bilă și dopuri, supape de accelerație, amortizoare).
Principalele unitati ale actionarii sunt: motor electric, reductor, actionare manuala, unitate de semnalizare a pozitiei. Mecanismele folosesc motoare de curent alternativ sincrone și asincrone. Reducerea vitezei și creșterea cuplului sunt realizate folosind angrenaje melcate și angrenaje combinate. Controlul manual se realizează cu ajutorul unei conduceri manuale. Lovirea roții de mână prin împingerea pe axa arborelui cu motorul oprit face ca roata de mână să se cupleze cu arborele motorului și să transmită cuplul la arborele de ieșire.
Acționările motoarelor electrice sunt cu o singură tură și cu mai multe ture, poziționale și proporționale. În Fig. 1 (a).
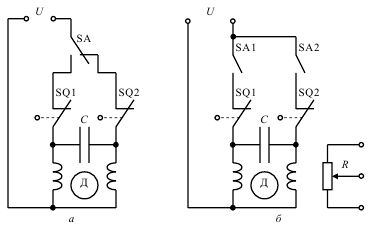
Orez. 1.Scheme de servomotoare cu motoare electrice bifazate: a-diagrama servomotorului cu două poziții; b — schema unui actuator proporțional
Comutatorul SA stabilește sensul de rotație al rotorului motorului electric, conectând condensatorul C la una sau la cealaltă înfășurare a motorului electric. Dacă comutatorul SA închide circuitul care conține SQ1, atunci motorul electric pornește și mișcă elementul de ieșire al actuatorului până când ajunge în poziția finală și comută întrerupătorul de limită SQ1. În acest caz, contactul SQ1 se va deschide, motorul se va opri. Pentru a muta organul de ieșire în cealaltă poziție finală, este necesar să comutați SA. Motorul este inversat și va funcționa până când contactul comutatorului de limită SQ2 se deschide.
O diagramă a unui actuator proporțional este prezentată în Fig. 1 (b). Închiderea contactului SA1 face ca elementul de ieșire al convertizorului să se miște în direcția înainte, iar închiderea SA2 în direcția inversă. Prin deschiderea contactului, puteți opri mecanismul în orice poziție intermediară a elementului de ieșire. Potențiometrul R este folosit ca transmițător de poziție. Întrerupătoarele de limită SQ1 și SQ2 opresc motorul electric în pozițiile finale, protejând mecanismul de deteriorare.
O diagramă a unui mecanism de antrenare cu un motor electric trifazat este prezentată în Fig. 3.
Un astfel de actuator poate fi utilizat, de exemplu, pentru a controla o supapă. Circuitul contine contactorul KM1, care include un mecanism de deschidere a supapei actuatorului, cu butonul de deschidere SB1 si contactorul KM2 cu butonul de inchidere SB2. Întrerupătorul de limită SQ1 este acţionat în poziţia finală închis.În diagramă, întrerupătoarele de limită sunt afișate în poziția de mijloc a supapei, niciunul dintre ele nu funcționează.
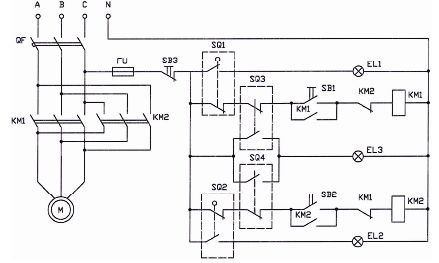
Orez. 2. Schema acționării cu motor electric trifazat
Când apăsați butonul SB1, KM1 va funcționa și va porni motorul electric pentru a deschide obturatorul. În poziția complet deschis, SQ1 va funcționa și cu contactul său de deschidere va opri KM1 și, în consecință, motorul electric, iar cu contactul său de închidere va aprinde lampa de semnalizare EL1 „deschis”.
Dacă apoi apăsați butonul SB2, KM2 va funcționa și va porni motorul electric pentru a închide supapa. Când supapa este închisă, SQ2 va funcționa, va opri KM2 și va activa alarma de închis (EL2).
Mecanismul de antrenare este echipat cu un ambreiaj limitator de cuplu. Dacă cuplul arborelui este depășit, de exemplu, atunci când supapa este blocată în timpul procesului de deschidere, întrerupătorul SQ3 se va opri și va opri motorul electric prin oprirea contactorului KM1. Dacă mecanismul este blocat în timpul procesului de închidere, SQ4 va funcționa și va opri KM2 și motorul electric. Ambele întrerupătoare, când sunt acționate, aprind indicatorul luminos „defecțiune” de pe EL3. Butonul SB3 poate fi folosit pentru a opri motorul în poziția intermediară a supapei.