Circuitele electrice ale acţionărilor electrice ale macaralelor rulante acţionate de la podea
Diagrame de robinet și caracteristici de protecție
 În industrie, în timpul operațiunilor de transport și depozitare de intensitate redusă, în sălile de mașini și sălile de laborator, se utilizează un număr mare de rulouri rulante, care funcționează fie sporadic, fie cu un număr de cicluri de ridicare de 6 - 10 pe oră. Nu este practic din punct de vedere economic să folosiți operatori cu normă întreagă pentru astfel de macarale. Acesta este motivul pentru care un număr tot mai mare de macarale rulante sunt acționate de la podea.
În industrie, în timpul operațiunilor de transport și depozitare de intensitate redusă, în sălile de mașini și sălile de laborator, se utilizează un număr mare de rulouri rulante, care funcționează fie sporadic, fie cu un număr de cicluri de ridicare de 6 - 10 pe oră. Nu este practic din punct de vedere economic să folosiți operatori cu normă întreagă pentru astfel de macarale. Acesta este motivul pentru care un număr tot mai mare de macarale rulante sunt acționate de la podea.
O caracteristică a podurilor macarale controlate de la podea este posibilitatea de acces la macara pentru reparații și control numai în locuri special amenajate, dotate cu zone adecvate pentru verificarea mecanismelor și echipamentelor electrice. Prin urmare, întregul sistem de protecție a echipamentului electric al macaralei trebuie construit astfel încât macaraua în condiții de urgență să poată fi adusă în zona de reparații sub control de la podea și în absența unei macarale în circuit. scurtcircuite și defecțiuni la pământ.
În acest sens, la macaralele acţionate de podea, întrerupătoare de circuit nu sunt instalate.Circuitele principale sunt protejate de un întrerupător automat de alimentare cărucioare de bazăși protecția circuitelor de control - sigurante pentru curenți 15 A, 380 V cu o secțiune a conductorilor circuitelor de comandă de 2,5 mm2. Se realizează protecția la suprasarcină a acționărilor electrice ale mecanismelor relee termice în circuitele principale ale motoarelor.
Pentru a permite robinetului să se miște după declanșarea protecției termice, contactele releului sunt conectate la un buton de pe panoul de control. Supapa este echipată cu lămpi de semnalizare pentru prezența tensiunii la intrare, tensiune după contactor pentru protecția liniei și o lampă de semnalizare pentru funcționarea protecției termice.
Scheme electrice ale mecanismelor de deplasare a podurilor rulante
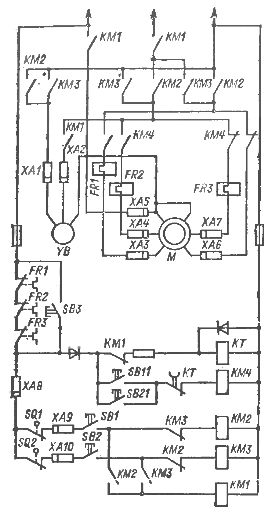
În fig. 1 prezintă o diagramă a unui antrenament electric în mișcare sub comanda unui scurtcircuit al unui motor cu o singură viteză.
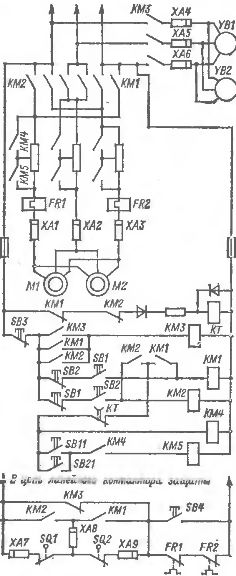
Orez. 1. Schema de antrenare electrică (cu un motor cu colivie cu o singură viteză) a mecanismului de mișcare a macaralei atunci când este acționat de la podea: M1, M2 — motoare electrice, YB1, YB2 — electromagneți de frână sau împingătoare electrohidraulice, KM1, KM2 — contactoare direcționale, KM4, KM5 — contactoare cu rezistență în statoarele circuitului, KMZ — contactor de frână, KT — releu de timp de pornire, FR1, FR2 — relee termice, SQ1, SQ2 — întrerupătoare de limită, SB1, SB2 — butoane de direcție de mișcare (două - mod), SB11, SB21 — butoane de pornire, SB3 — buton de oprire a mișcării libere, SB4 — buton de bypass de protecție termică, XA1 — XA9 — contactele cărucioarelor de transfer de curent
Acest circuit este proiectat pentru a conduce macarale cu boghiu cu o capacitate de încărcare de 3-20 tone și acționări de macarale pentru macarale cu o capacitate de încărcare de 2-5 tone.Înfășurarile statorice ale unui motor cu colivie sunt alimentate de la rețea prin două trepte de rezistențe. Caracteristicile mecanice ale unității sunt prezentate în Fig. 2, a.
Controlul acționării electrice — de la butoanele suspendate. Controlul include două butoane principale cu două direcții SB1 și SB2, care dau o comandă de deplasare în două direcții. Trecerea la o poziție fără reglarea rezistențelor se realizează atunci când comenzile sunt emise folosind butoanele SB11, SB21.
Când motorul este pornit, puterea transmisiei de frână YB este furnizată prin contactele contactoarelor KM1, KM2 prin contactele KMZ. După oprirea motorului electric, acționarea frânei continuă să primească putere și mecanismul are o rulare liberă.Pentru a elibera frâna, utilizați butonul SB3, care este comun boghiului și mecanismului de osie. Când este declanșat întrerupătoare de limită SQ1 și SQ2, contactorul de linie de protecție este declanșat și suprapus frana mecanica.
Pentru a furniza energie electrică frânarea opusă după ce este folosit boot-ul gratuit releu de timp CT cu o întârziere de 2-3 s, care încetinește antrenamentul la o poziție cu cuplu minim de pornire (frânare).
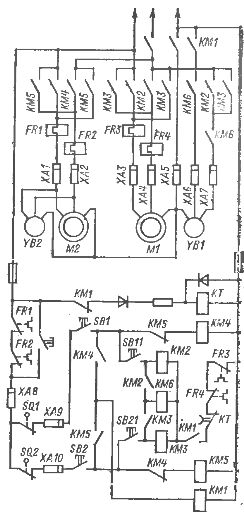
În fig. 3 prezintă o schemă a unui antrenament electric pentru deplasarea cu ajutorul unui rulant rulant (cărucior). motoare cu colivie cu două viteze… Motorul are două înfășurări separate cu un raport de poli



Butonul SB1 sau SB2 include contactoarele direcționale KM1, KM2 precum și contactorul de viteză mică KM4. După alimentarea înfășurării de viteză mică a motorului prin contactorul KMZ, actuatorul de frână YB1, YB2 primește putere.Pentru a comuta la viteză mare, butoanele cu două direcții SB închid contactele SB11, SB21 (a doua poziție) și pornesc contactorul KM6.
Bobina de mare viteză este conectată la rețea printr-un rezistor în același timp cu bobina de viteză mică. Bobina de viteză mică este apoi oprită. După întârzierea releului KT (2-5 s), contactorul KM5 pornește și motorul își atinge caracteristica naturală a modului de mare viteză (Fig. 2, b).
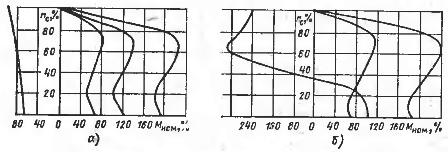
Orez. 2. Caracteristicile mecanice ale diagramelor fig. 13
Când motorul este deconectat de la rețea, dispozitivul de acționare a frânei continuă să primească putere și are loc deplasarea. Frânarea electrică poate fi aplicată la trecerea de la viteză mare la viteză mică. Pentru a elibera frâna, apăsați pur și simplu butonul SB3.
Când ultima apărare este declanșată prin deschidere contactor de linie pe panoul de protectie motorul electric este oprit și frâna mecanică este cuplată. Mecanismul este inhibat cu intensitate maximă.
Datorită utilizării rezistențelor în circuitul pentru înfășurările de mare viteză, o pornire relativ ușoară este efectuată sub controlul releului de timp KT, dar cuplul de frânare al înfășurării de viteză mică nu este limitat și, în acest caz, moale. frânarea poate fi realizată prin mai multe comutatoare de impuls ale butonului SB1 sau SB2.
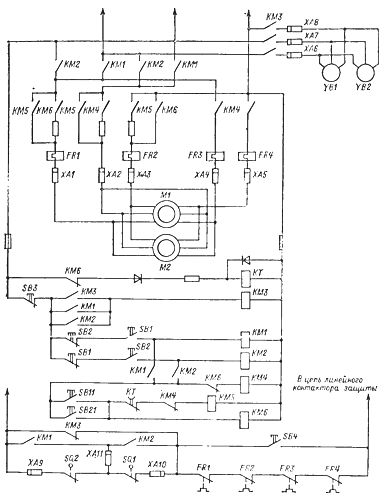
Orez. 3. Schema acționării electrice (cu motor cu colivie cu două trepte) a mecanismului de mișcare a macaralei la acționare de la podea: M1.M2 - motoare electrice, YB1, YB2 - acționări de frână, KM1, KM 12 - contactoare pentru sensul de deplasare, KMZ - contactor de frână, KM4 - contactor de viteză mică, KM5 - contactor de viteză mare, KM6 - contactor de rezistență în circuitul statorului, FRI, FR2 , FR3 — relee termice, KT — releu de control al timpului de funcționare, SQ1, SQ2 — întrerupătoare de limită, SB1, SB2 — butoane de direcție de deplasare (bidirecționale): SB11, SB21 — butoane de mare viteză (a doua poziție a butonului SB1, SB2), СВЗ — eliberarea butonului de oprire liberă, SB4 — buton de bypass de protecție termică, ХА1- ~ ХЛ11 — contactele cărucioarelor de transmisie curentă.
În fig. 4 prezintă o diagramă a mecanismului de deplasare al unui rulant rulant folosind un motor cu două viteze fără scurgere liberă. Circuitul diferă de cel considerat prin includerea secvenţială a înfăşurărilor de viteză mică şi de mare viteză şi o anumită limitare a cuplului de frânare atunci când înfăşurările sunt conectate în serie. Schema este recomandată pentru macaralele rulante care funcționează în aer liber.
Diagrame de conectare a mecanismelor de ridicare a macaralelor
În fig. 5 prezintă un circuit de comandă pentru o acţionare a palanului electric care utilizează un motor cu două viteze cu colivie cu două înfăşurări independente cu un raport de numărare a polilor de 4/24 şi 6/16. Circuitul este construit pe principiul dublei ruperi de la două dispozitive independente ale circuitului principal al înfășurărilor motorului electric și ale circuitelor de antrenare a frânei, ceea ce asigură fiabilitatea necesară acționării palanului.
Înfășurarea de viteză mică a motorului electric primește putere prin contactele contactorului de linie KM1, contactele contactoarelor de direcție KM2, KMZ și contactele de întrerupere ale contactorului KM4 după apăsarea butonului corespunzător SB1, SB2 (prima poziție).
Orez. 4. Schema de antrenare electrică (cu un motor cu colivie cu două viteze) a mecanismului de mișcare a macaralei: M - motor electric, YB - acționare frână, KM1, KM2 - contactoare pentru direcția de mișcare, KMZ - viteză mică contactor, KM4 — contactor de mare viteză , KM5 — Contactor cu rezistență de mare viteză, CT — Releu de control al timpului de pornire, FR4 — Relee termice, SQ1, SQ2 — Întrerupătoare de limită, SB1, SB2 — Butoane de direcție de deplasare, SB11, SB21 — Înaltă Butoane de viteză, SB3 — Buton de bypass pentru releu termic, XA1 -XA10 — contacte de transfer curent
Când butonul SB11 (SB21) este apăsat, bobina contactorului KM4 primește putere, trece de la viteză mică la viteză mare cu întreruperi minime de alimentare. În acest caz, nu poate exista nicio poziție când bobinele de mare viteză și de viteză mică sunt dezactivate. Trecerea de la o înfășurare de viteză mică la o înfășurare de mare viteză se realizează sub controlul releului de timp KT. Când protecția limită este activată, înfășurările motorului și frâna sunt activate de două ori.
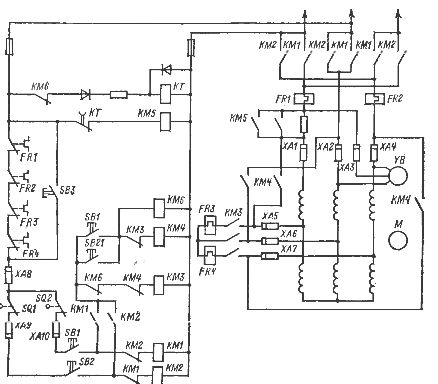
În fig. 6 prezintă o diagramă a acționării electrice a mecanismului de ridicare cu două motoare electrice în scurtcircuit conectate între ele și la cutia de viteze printr-un angrenaj planetar cu un raport de transmisie de 6-8. Motorul electric de viteză mică M2 este pornit pe toată durata de funcționare a mecanismului. Motorul de mare viteză este cuplat în timpul funcționării la viteză mare.Motorul electric de viteza mica are frana incorporata.
Orez. 5. Schema acționării electrice (cu un motor cu colivie cu două viteze) a mecanismului de ridicare atunci când este acționat de la podea: M - motor electric, YB - bobină de frână, KM1 - contactor de crin, KM2 - KMZ - contactori direcționali, KM4 — contactor pentru viteză de comutare, FR1 — FR3 — releu termic, CT — releu de control accelerație, SQ1, SQ2 — întrerupătoare de limită, SB1, SB2 — butoane de direcție (bidirecțional). SB3 — buton pentru manevrarea releelor termice, SB11, SB21 — butoane de mare viteză (a doua poziție a butoanelor SB1, SB2), XA1 — XA10 — contactele cărucioarelor de transfer de curent.
Orez. 6. Schema micromotorului mecanismului de ridicare atunci când este acționat de la podea: M1 - motor electric de mare viteză, M2 - motor electric de viteză mică, YB1 - bobină de frână de mare viteză, YB2 - bobină de frână a motorului de viteză mică, KM1 - contactor liniar, KM2 - KMZ - rotații contactoare de direcție mare, KM4, KM5 - contactoare de viteză mică, KM6 - contactor de frână de mare viteză, KT - releu de control al timpului de pornire, SQ1, SQ2 - întrerupătoare de limită, FR1 - FR4 - relee termice, SB1, SB2 - butoane de direcție în două sensuri , SB11, SB21 - butoane de mare viteză (a doua poziție a butoanelor SB1, SB2), XA1— XA10 - contactele cărucioarelor de transfer curent
Motorul electric de mare viteză are o frână separată acţionată de propulsor electro-hidraulic… Când butonul de direcție SB1 (SB2) este apăsat, bobina contactorului KM4 (KM5) este alimentată și motorul de viteză mică este pornit. În același timp, contactorul de linie comun KM1 este pornit.
Când butonul SB1 (SB2) este apăsat complet, contactele SB11 (SB21) sunt închise, bobina contactorului KM2 (KMZ) și KM6 este alimentată, dar după ce timpul de pornire la viteză mică sub controlul releului KT a expirat. , motorul de mare viteză este pornit .
Când decelerați ascensiunea sau coborârea după ce motorul de mare viteză este oprit, frânarea la o viteză mică este efectuată de frâna YB1. După acţionarea comutatoarelor de limită SQ1 şi SQ2, acţionarea electrică este oprită cu un circuit dublu deschis al acţionărilor motorului şi frânei.
Toate schemele descrise, în conformitate cu prevederea de activare a mecanismelor macaralei atunci când se lucrează de la podea, numai cu o apăsare constantă a butonului Când orice tip de protecție este oprit, mecanismul se oprește, indiferent de starea comenzii butonului dispozitiv.
Schemele considerate în fig. 2-5 pot fi asamblate din demaroare magnetice standard tip PMA, PML și releu de timp. O excepție este diagrama din fig. 2 în care se folosește un contactor pentru comutarea rotațiilor contactor de curent continuu MK1-22, 40 A, 380 V, bobină 220 V. Conform schemelor indicate, au fost panouri de comandă pentru motoare cu o putere de la 0,8 până la 2×8,5 kW și panouri de comandă pentru ridicarea motoarelor cu o putere de la 10 până la 22 kW dezvoltat .