O metodă intuitivă pentru proiectarea schemelor de control
 Metoda intuitivă — o metodă de dezvoltare a schemelor de control bazată pe experiența dobândită în diverse organizații de proiectare în automatizarea diferitelor mecanisme. Se bazează pe intuiția inginerească a designerului.
Metoda intuitivă — o metodă de dezvoltare a schemelor de control bazată pe experiența dobândită în diverse organizații de proiectare în automatizarea diferitelor mecanisme. Se bazează pe intuiția inginerească a designerului.
Numai cel care a absorbit toată experiența anterioară și are anumite abilități în ceea ce privește elaborarea schemelor, care poate gândi abstract și raționa logic, poate stăpâni perfect această metodă. În ciuda complexității sale, majoritatea designerilor electrici folosesc metoda intuitivă pe scară largă.
De exemplu, luați în considerare o diagramă cinematică simplificată a unei pârghii de împingere (Fig. 1). Când roata 5 se rotește în sensul acelor de ceasornic, pârghia 4 rotește pârghia 1 în jurul axei O, forțând astfel pantoful 3 cu pârghia 2 să se translate. Odată cu rotirea în continuare a roții 5, direcția de mișcare a pârghiei 1 se schimbă și pantoful revine în poziția inițială, după care motorul trebuie să se oprească.
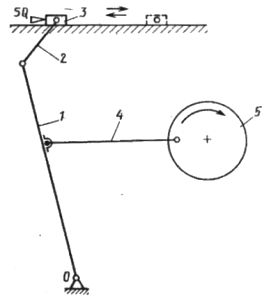
Orez. 1. Schema schematică a comenzii împingătorului pârghiei
Mecanismul considerat este un reprezentant tipic al unui dispozitiv de împingere.În primul ciclu, mecanismul este pornit și funcționează. In a doua masura nu merge. Ciclul în care mecanismul nu funcționează se numește zero. Deși pantoful este complet alternativ (înainte și înapoi), pentru propulsie poate fi folosit un motor electric nereversibil.
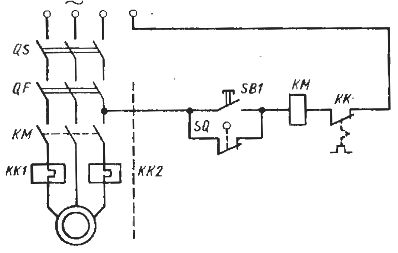
Circuitul de control al motorului electric pârghie-piston este format din două părți (în Fig. 1 sunt separate printr-o linie punctată): circuitul de putere și circuitul de control.
Luați în considerare scopul elementelor circuitului de putere. Întrerupătorul QS este furnizat curent trifazat, care întrerupe alimentarea cu energie electrică a motorului electric în caz de reparație sau deteriorare a demarorului magnetic. Apoi curentul trece prin întrerupătorul a cărui declanșare QF este prezentată în diagramă. Este proiectat pentru a proteja și deconecta sursa de alimentare a convertizorului în cazul unor curenți de scurtcircuit. Contactele principale ale demarorului magnetic KM pornesc sau opresc înfășurarea motorului electric M.
Releele termice KK1 și KK2, ale căror elemente de încălzire sunt prezentate în circuitele de putere, sunt proiectate pentru a proteja motorul electric de suprasarcini prelungite:
Schema de control funcționează după cum urmează. Când apăsați butonul de pornire SB1, bobina demarorului magnetic KM este alimentată și, prin urmare, contactele circuitului de alimentare al KM sunt închise și curentul electric intră în înfășurarea motorului. Rotorul motorului este rotit și tamburul începe să se miște înainte. În același timp, se îndepărtează de pârghia comutatorului de limită SQ și contactele acestuia sunt închise.
Când butonul de pornire SB1 este eliberat și contactele acestuia sunt deschise, bobina KM a demarorului magnetic va primi energie prin contactele comutatorului de limită SQ.După deplasarea înainte și apoi înapoi, pistonul va apăsa pârghia comutatorului de limită SQ, contactele acestuia se vor deschide și bobina KM se va opri. Acest lucru va face ca contactele KM din circuitul de alimentare să se deschidă și să oprească motorul electric.
Circuitul considerat conține circuite de putere și de control. În viitor, vor fi luate în considerare doar schemele de control.
După funcție, adică după scop, toate elementele implicate în funcționarea circuitului pot fi împărțite în trei grupe: contacte de comandă, elemente intermediare și elemente executive.
Contactele de control sunt elementele cu care sunt emise comenzi (butoane de control, întrerupătoare, întrerupătoare de limită, convertoare primare, contacte relee etc.).
Însuși numele elementelor intermediare indică faptul că acestea ocupă o poziție intermediară între elementele de control și cele executive. În circuitele releu-contact, acestea includ relee de timp și relee intermediare, iar în circuitele fără contact - porți logice.
Elementele executive sunt mecanisme executive. Cu toate acestea, la dezvoltarea circuitelor de control, mecanismele de antrenare în sine (motoare electrice sau elemente de încălzire) nu sunt utilizate, ci dispozitivele care le includ, adică. demaroare magnetice, contactoare etc.
Toate contactele de control, conform principiului lor funcțional, sunt împărțite în cinci tipuri: contact de pornire cu acțiune scurtă (PC), contact de pornire cu acțiune lungă (PD), contact de oprire cu acțiune scurtă (OK), contact de oprire cu acțiune lungă (OD) ), contact pornire-oprire (software). Aceste contacte sunt numite principale.
Ciclogramele funcționării tuturor contactelor tipice în controlul mecanismelor ciclice sunt prezentate în fig. 2.
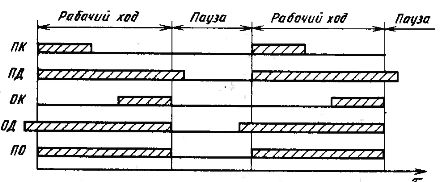
Orez. 2.Ciclograma contactelor de control
Fiecare dintre cele cinci contacte începe să funcționeze (se închide) și se termină (se deschide) la anumite momente de timp. Deci, contactele de pornire își încep activitatea împreună cu începutul cursei de lucru, dar contactul YAK încetează să funcționeze în timpul cursei de lucru, OD - în timpul pauzei, adică diferă unul de celălalt numai în momentele opririi ( deschidere).
Contactele de oprire, care, spre deosebire de contactele de pornire, încetează să funcționeze în același timp cu sfârșitul cursei de lucru, diferă în momentele de includere (închidere). Contactul de oprire OK își începe funcționarea în timpul cursei de lucru, iar contactul OD - în timpul pauzei. Doar contactul software-ului își începe lucrul odată cu începutul cursului de lucru și se termină cu sfârșitul acestuia.
Cu ajutorul celor cinci contacte principale considerate, este posibil să se obțină patru scheme de control al elementelor executive și intermediare, care sunt numite scheme tipice (Fig. 3).

Orez. 3. Scheme tipice de control pentru circuitele executive și intermediare
Primul circuit tipic (Fig. 3, a) are un singur contact de control software. Dacă este închis, atunci curentul electric trece prin actuatorul X, iar dacă este deschis, nu curge nici un curent. Contactul PO are propriul său sens și toate celelalte contacte trebuie folosite în perechi (pornire și oprire).
Al doilea circuit tipic are două contacte de comandă cu acțiune continuă: PD și OD (Fig. 3, b).
Al treilea circuit tipic constă din contactul de pornire al computerului și contactul de oprire OD, pe lângă contactele de control, acest circuit ar trebui să includă un contact de blocare x, prin care actuatorul X va continua să primească putere după contactul de pornire al calculatorul este deschis (Fig. 3, c).
A patra schemă tipică se bazează pe două contacte pe termen scurt: porniți un computer și opriți OK, conectat în paralel (Fig. 3, d).
Cele patru scheme tipice date permit (ca din cuburi) să compună scheme complexe paralel-seriale pentru controlul contactelor. Deci, de exemplu, schema de control a pârghiei luată în considerare (vezi Fig. 1) se bazează pe cea de-a patra schemă tipică. Utilizează butoanele SB1 ca contact de pornire pe termen scurt și comutatorul de limită SQ ca contact de oprire pe termen scurt.
Atunci când se elaborează o schemă de control folosind o metodă intuitivă, este necesar să se determine corect tipul contactului de control, adică durata acțiunii sale.
Luați în considerare un exemplu de dezvoltare a unei scheme de control folosind o metodă intuitivă folosind scheme tipice.
Să fie necesară dezvoltarea unui dispozitiv semi-automat pentru controlul unui inductor și a unui dispozitiv de pulverizare a unei instalații destinate încălzirii unui produs cu curenți de înaltă frecvență și apoi răcirii lui cu jeturi de apă. Timpul de încălzire a produsului în inductor este de 12 s, iar timpul de răcire este de 8 h. Produsul este instalat manual în inductor.
În primul rând, vom analiza funcționarea dispozitivului semi-automat și vom determina toate elementele executive și intermediare. Muncitorul instalează manual produsul în inductor și apasă butonul de pornire.În acest moment, inductorul pornește și începe încălzirea produsului. În același timp, releul de timp ar trebui să pornească și el, ținând cont de timpul de încălzire (12 s).
Acest releu de timp (mai precis, contactele sale) oprește inductorul și pornește sprinklerul, care furnizează apă pentru răcire. În același timp, un al doilea releu trebuie pornit pentru a număra invers timpul de răcire, adică pentru a opri pulverizatorul. În acest fel, este necesar să controlați patru elemente: un inductor, un dispozitiv de pulverizare și două relee de timp.
Inductorul este pornit și oprit printr-un contactor, motiv pentru care este necesar să îl controlați pe acesta din urmă. Pulverizatorul este controlat de o supapă solenoidală.
Să desemnăm bobina (bobina) contactorului KM1, bobina electrovanei KM2 și bobinele releului de timp KT1 și respectiv K.T2. Astfel, avem două actuatoare: KM1 și KM2 și două elemente intermediare: KT1 și KT2.
Din analiza efectuată, rezultă că încălzirea ar trebui să înceapă mai întâi, adică bobina KM1 va fi excitată. Butonul de declanșare SB (acțiune scurtă) este utilizat ca contact de pornire. Astfel, se aplică fie a treia, fie a patra schemă tipică.
Lăsați inductorul să fie deconectat de la contactele releului de timp KT1.1, care în acest caz sunt contacte cu acțiune lungă. Prin urmare, alegem a treia schemă tipică. Concomitent cu înfășurarea demarorului magnetic KM1, este necesară pornirea releului de timp KT1, ceea ce este foarte ușor de realizat conectându-le în paralel.
Luați în considerare funcționarea circuitului rezultat (Fig. 4, a).
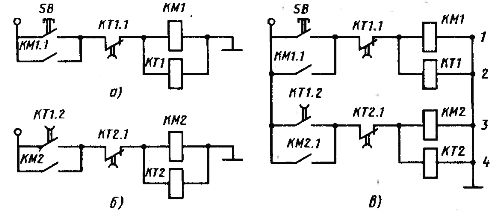
Orez. 4.Circuite de control: a — inductor și releu pentru timpul de încălzire, b — dispozitivul sprinkler și timpul de răcire a releului, c — instalația în ansamblu
Când apăsați butonul de pornire SB, bobina contactorului KM1 este alimentată, adică începe încălzirea produsului. În același timp, bobina releului de timp KT1 este alimentată și începe numărătoarea inversă a timpului de încălzire. Cu ajutorul contactului de blocare KM1.1 se va menține tensiunea bobinei KM1 și după eliberarea butonului de declanșare SB, adică. după deschiderea contactelor sale.
După expirarea timpului de încălzire, releul de timp KT1 va funcționa, contactul său KT1.1 se va deschide. Acest lucru va face ca bobina KM1 să se oprească (încălzirea produsului se va termina). Pulverizatorul ar trebui să fie acum pornit. Poate fi pornit de releul de timp KT1 prin închiderea contactului. Când pulverizatorul este pornit, releul de timp KT1 este oprit. Prin urmare, contactul de închidere KT1.1 va fi un contact pe termen scurt. Prin urmare, vom folosi din nou a treia schemă tipică.
Concomitent cu pulverizatorul, este necesar să porniți releul de timp KT2, care numără invers timpul de răcire. În acest scop, vom folosi tehnica aplicată și vom conecta bobina releului de timp KT2 în paralel cu bobina KM2. Astfel obținem a doua schemă de control (Fig. 4, b). Combinând cele două circuite (Fig. 4, a și b), obținem o schemă generală de control (Fig. 4, c).
Să considerăm acum funcționarea circuitului ca întreg (Fig. 4, c). Când apăsați butonul de pornire SB, bobinele contactorului KM1 și releul de timp KT1 sunt alimentate și produsul începe să se încălzească.După 12 s, releul de timp KT1 va funcționa și contactele sale din circuitul 1 se vor deschide și din circuitul 2 se vor închide. Produsul va începe să se răcească. Concomitent cu bobina KM2 a electrovalvei, releul de timp K va fi alimentat T2, numărând în jos timpul de răcire.La deschiderea contactului KT2.1 (circuitul 3), supapa KM2 și releul de timp KT2 sunt oprite și circuitul revine la pozitia initiala.
Schema de control rezultată a inductorului și a sprinklerelor a fost dezvoltată folosind o metodă intuitivă. Cu toate acestea, nu există dovezi că această schemă va fi corectă și optimă. Problema operabilității circuitului poate fi rezolvată numai după producerea acestuia și verificarea experimentală atentă. Acesta este tocmai cel mai mare dezavantaj al metodei intuitive. Neajunsul remarcat este absent în metoda analitică. Metoda analitică pentru elaborarea schemelor de control va fi discutată în articolul următor.